 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
圖1 無人駕駛系統(tǒng)架構(gòu)圖
算法子系統(tǒng)從傳感器原始數(shù)據(jù)中提取有意義的信息以了解周遭環(huán)境情況,并根據(jù)環(huán)境變化做出決策。Client子系統(tǒng)融合多種算法以滿足實(shí)時(shí)性與可靠性的要求。舉例來說,傳感器以60HZ的速度產(chǎn)生原始數(shù)據(jù),Client子系統(tǒng)需要保證最長的流水線處理周期也能在16ms內(nèi)完成。云平臺為無人車提供離線計(jì)算以及存儲功能。通過云平臺,我們能夠測試新的算法、更新高精度地圖并訓(xùn)練更加有效的識別、追蹤、決策模型。
無人駕駛算法
算法系統(tǒng)由幾部分組成:第一,傳感并從傳感器原始數(shù)據(jù)中提取有意義信息;第二,感知,以定位無人車所在位置以及感知現(xiàn)在所處的環(huán)境;第三,決策,以可靠安全抵達(dá)目的地。
傳感
通常來說,一輛無人駕駛汽車裝備有許多不同類型的主傳感器。每一種類型的傳感器都各有優(yōu)劣,因此,來自不同傳感器的傳感數(shù)據(jù)應(yīng)該有效地進(jìn)行融合。現(xiàn)在無人駕駛中普遍使用的傳感器包括以下幾種。
GPS/IMU:通過高達(dá)200Hz頻率的全球定位和慣性更新數(shù)據(jù)以幫助無人車完成自我定位。GPS是一個(gè)相對準(zhǔn)確的定位用傳感器,但是它的更新頻率過低,僅僅有10HZ,不足以提供足夠?qū)崟r(shí)的位置更新。IMU的準(zhǔn)確度隨著時(shí)間降低,在長時(shí)間內(nèi)并不能保證位置更新的準(zhǔn)確性,但是,它有著GPS所欠缺的實(shí)時(shí)性,IMU的更新頻率可以達(dá)到200HZ或者更高。通過整合GPS與IMU,我們可以為車輛定位提供既準(zhǔn)確又足夠?qū)崟r(shí)的位置更新。
LiDAR:激光雷達(dá)可被用來繪制地圖、定位以及避障。雷達(dá)的準(zhǔn)確率非常高,因此在無人車設(shè)計(jì)中雷達(dá)通常被作為主傳感器使用。激光雷達(dá)是以激光為光源,通過探測激光與被探測無相互作用的光波信號來完成遙感測量。激光雷達(dá)可以用來產(chǎn)生高精度地圖,并針對高精地圖完成移動車輛的定位;以及滿足避障的要求。以Velodyne 64-束激光雷達(dá)為例,它可完成10HZ旋轉(zhuǎn)并每秒可達(dá)到130萬次讀數(shù)。
攝像頭:被廣泛使用在物體識別以及物體追蹤等場景中,像是車道線檢測、交通燈偵測、人行道檢測中都以攝像頭為主要解決方案。為了加強(qiáng)安全性,現(xiàn)有的無人車實(shí)現(xiàn)通常在車身周圍使用至少八個(gè)攝像頭,分別從前、后、左、右四個(gè)維度完成物體發(fā)現(xiàn)、識別、追蹤等任務(wù)。這些攝像頭通常以60HZ的頻率工作,當(dāng)多個(gè)攝像頭同時(shí)工作時(shí),將產(chǎn)生高達(dá)1.8GB每秒的巨數(shù)據(jù)。
雷達(dá)和聲吶:雷達(dá)通過把電磁波能量射向空間某一方向,處在此方向上的物體反射碰到的電磁波;雷達(dá)再接收此反射波,提取有關(guān)該物體的某些信息(目標(biāo)物體至雷達(dá)的距離,距離變化率或徑向速度、方位、高度等)。雷達(dá)和聲吶系統(tǒng)是避障的最后一道保障。雷達(dá)和聲吶產(chǎn)生的數(shù)據(jù)用來表示在車的前進(jìn)方向上最近障礙物的距離。一旦系統(tǒng)檢測到前方不遠(yuǎn)有障礙物出現(xiàn),則有極大的相撞危險(xiǎn),無人車會啟動緊急剎車以完成避障。因此,雷達(dá)和聲吶系統(tǒng)產(chǎn)生的數(shù)據(jù)不需要過多的處理,通常可直接被控制處理器采用,并不需要主計(jì)算流水線的介入,因?yàn)榭蓪?shí)現(xiàn)轉(zhuǎn)向,剎車、或預(yù)張緊安全帶等緊急功能。
感知
在獲得傳感信息之后,數(shù)據(jù)將被推送至感知子系統(tǒng)以充分了解無人車所處的周遭環(huán)境。在這里感知子系統(tǒng)主要做的是三件事:定位、物體識別以及物體追蹤。
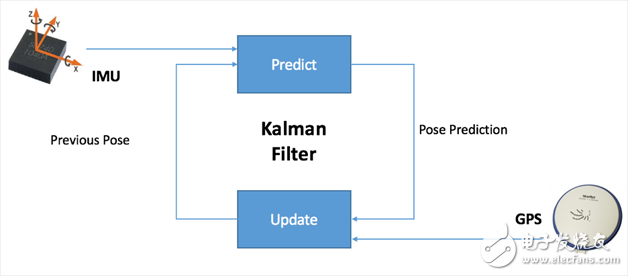
圖2 基于GPS/IMU的定位
定位
GPS以較低的更新頻率提供相對準(zhǔn)確的位置信息;IMU則以較高的更新頻率提供準(zhǔn)確性偏低的位置信息。我們可使用卡爾曼濾波來整合兩類數(shù)據(jù)各自的優(yōu)勢,合并提供準(zhǔn)確且實(shí)時(shí)的位置信息更新。如圖2所示,IMU每5ms更新一次,但是期間誤差不斷累積精度不斷降低。所幸的是,每100ms可以得到一次GPS數(shù)據(jù)更新,以幫助我們校正IMU積累的誤差。因此,我們最終可以獲得實(shí)時(shí)并準(zhǔn)確的位置信息。然而,我們不能僅僅依靠這樣的數(shù)據(jù)組合以完成定位工作。原因有三:其一,這樣的定位精度僅在一米之內(nèi);其二,GPS信號有著天然的多路徑問題將引入噪聲干擾;其三,GPS必須在非封閉的環(huán)境下工作,因此在諸如隧道等場景中GPS都不適用。
- 用于自動駕駛,無人駕駛領(lǐng)域的IMU六軸陀螺儀傳感器:M-G370
- 32.768K晶振X1A000141000300適用于無人駕駛汽車電子設(shè)備
- 無人駕駛汽車的路徑規(guī)劃與跟隨控制算法案例 3次下載
- 無人駕駛車輛開源分享
- 技術(shù)前沿:今日的創(chuàng)新如何改變無人駕駛的未來
- 基于矢量傳感器的無人駕駛汽車信號遠(yuǎn)程監(jiān)測系統(tǒng) 19次下載
- 無人駕駛汽車模型預(yù)測控制相關(guān)源代碼 29次下載
- 了解無人駕駛汽車原理
- 無人駕駛汽車的未來仿真如何
- 無人駕駛汽車的來源及其四個(gè)階段技術(shù)特征的詳解 18次下載
- 無人駕駛之光學(xué)雷達(dá)技術(shù)探究 3次下載
- 介紹ADAS與無人駕駛的關(guān)系 10次下載
- 無人駕駛核心公司競爭力排行 3次下載
- 無人駕駛要收集多少數(shù)據(jù)才夠? 17次下載
- 無人駕駛技術(shù)及產(chǎn)業(yè)鏈精華集錦 46次下載
- 無人駕駛汽車的發(fā)展前景詳細(xì)說明 1.4w次閱讀
- 無人駕駛汽車有什么優(yōu)點(diǎn)和缺點(diǎn) 9.2w次閱讀
- 無人駕駛汽車的工作原理和特點(diǎn)詳細(xì)說明 2.5w次閱讀
- 無人駕駛汽車的發(fā)展前景分析 1.4w次閱讀
- 無人駕駛系統(tǒng)的軟件架構(gòu)是怎樣的 6091次閱讀
- 在無人駕駛車?yán)锿嬗螒?VR+無人駕駛是怎么樣的體驗(yàn) 1w次閱讀
- 無人駕駛技術(shù)主要有幾種技術(shù)組成 4.5w次閱讀
- 詳細(xì)無人駕駛汽車的關(guān)鍵技術(shù)——LiDAR 1.7w次閱讀
- 無人駕駛汽車技術(shù)_無人駕駛汽車關(guān)鍵技術(shù)_無人駕駛汽車技術(shù)原理 2.9w次閱讀
- 無人駕駛技術(shù)原理_無人駕駛技術(shù)的應(yīng)用_無人駕駛技術(shù)的現(xiàn)狀及發(fā)展(前景) 4.6w次閱讀
- 無人駕駛技術(shù)哪家厲害_美國無人駕駛技術(shù)領(lǐng)先中國多少? 1.3w次閱讀
- 奔馳無人駕駛解決方案及奔馳f015無人駕駛方案 1.3w次閱讀
- 無人駕駛汽車技術(shù)實(shí)現(xiàn) 1.1w次閱讀
- 無人駕駛關(guān)鍵技術(shù)分析 2.2w次閱讀
- 無人駕駛如何前行? 784次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1AN-1267: 使用ADSP-CM408F ADC控制器的電機(jī)控制反饋采樣時(shí)序
- 1.41MB | 5次下載 | 免費(fèi)
- 2AN158 GD32VW553 Wi-Fi開發(fā)指南
- 1.51MB | 2次下載 | 免費(fèi)
- 3Multisim的上百個(gè)仿真實(shí)例資料合集
- 12.34 MB | 1次下載 | 10 積分
- 4嵌入式軟件開發(fā)符合ISO 26262 功能安全標(biāo)準(zhǔn)
- 1.61 MB | 1次下載 | 免費(fèi)
- 5AN148 GD32VW553射頻硬件開發(fā)指南
- 2.07MB | 1次下載 | 免費(fèi)
- 6PZT驅(qū)動開關(guān)電路
- 0.09 MB | 1次下載 | 免費(fèi)
- 7選擇DSP處理器ADSP-2101與DSP16A的注意事項(xiàng)
- 728.91KB | 次下載 | 免費(fèi)
- 8EE-23:AD1847/ADSP-2181環(huán)回示例,使用單個(gè)索引寄存器實(shí)現(xiàn)SPORT自動緩沖
- 22.82KB | 次下載 | 免費(fèi)
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費(fèi)
- 2免費(fèi)開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 139次下載 | 1 積分
- 3基于STM32單片機(jī)智能手環(huán)心率計(jì)步器體溫顯示設(shè)計(jì)
- 0.10 MB | 132次下載 | 免費(fèi)
- 4美的電磁爐維修手冊大全
- 1.56 MB | 24次下載 | 5 積分
- 5如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費(fèi)
- 6感應(yīng)筆電路圖
- 0.06 MB | 10次下載 | 免費(fèi)
- 7LZC3106G高性能諧振控制器中文手冊
- 1.29 MB | 9次下載 | 1 積分
- 8萬用表UT58A原理圖
- 0.09 MB | 9次下載 | 5 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論