 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
設(shè)計(jì)了一種基于模糊參數(shù)自整定的模糊控制智能小車調(diào)速系統(tǒng),該智能車調(diào)速系統(tǒng)核心控制單元采用飛思卡爾半導(dǎo)體公司的HCS12 單片機(jī)。實(shí)驗(yàn)證明,該智能車調(diào)速系統(tǒng)能很好地滿足小車在前進(jìn)過(guò)程中對(duì)速度調(diào)節(jié)的快速響應(yīng)和穩(wěn)態(tài)誤差小的要求,系統(tǒng)具有較好的動(dòng)態(tài)性能和良好的魯棒性。
智能車設(shè)計(jì)系統(tǒng)是一種以汽車電子為背景,涵蓋控制、模式識(shí)別、傳感技術(shù)、電子、電氣、計(jì)算機(jī)、機(jī)械等多學(xué)科的科技創(chuàng)意性設(shè)計(jì),它主要由路徑識(shí)別,速度采集,角度控制及車速控制等功能模塊組成。該實(shí)驗(yàn)過(guò)程要求小車在白色場(chǎng)地上,通過(guò)轉(zhuǎn)向角和車速的控制,使其自動(dòng)地沿著一條任意給定的黑色帶狀引導(dǎo)線行駛。
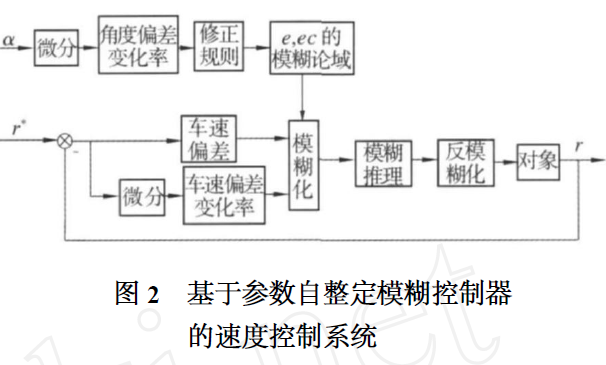
模糊控制器的參數(shù)整定是智能車控制系統(tǒng)中一個(gè)十分重要的環(huán)節(jié)。傳統(tǒng)的車速控制方法有PID 控制、最優(yōu)控制等。模糊控制的特點(diǎn)是控制響應(yīng)快,對(duì)于不確定性因素的適應(yīng)性強(qiáng)。采用Fuzzy2PI 控制策略進(jìn)行直流電機(jī)的調(diào)速系統(tǒng)設(shè)計(jì),克服了簡(jiǎn)單模糊控制和傳統(tǒng)PI 控制的一些缺點(diǎn)。介紹了一種基于參數(shù)自整定的模糊控制單片機(jī)直流無(wú)刷電動(dòng)機(jī)調(diào)速系統(tǒng),采用參數(shù)自整定模糊控制器,使系統(tǒng)具有較高的控制精度和良好的魯棒性。提出一種應(yīng)用模糊推理功能實(shí)現(xiàn)PID 參數(shù)自整定的控制方法,可根據(jù)船舶動(dòng)態(tài)特性的變化,自動(dòng)重新整定PID 參數(shù),從而改善了操縱性能和魯棒性。提出了利用自適應(yīng)模糊PID 控制器實(shí)現(xiàn)對(duì)永磁無(wú)刷直流電機(jī)調(diào)速系統(tǒng)進(jìn)行設(shè)計(jì)的新方法,通過(guò)自適應(yīng)因子將模糊控制器和PID 控制器結(jié)合,在線自調(diào)整控制參數(shù),從而完善了PID 控制器的性能,提高了系統(tǒng)的控制精度。本研究著重分析智能車控制系統(tǒng)中最重要的速度控制問(wèn)題,從傳統(tǒng)的模糊控制思想出發(fā),根據(jù)智能車前進(jìn)過(guò)程中對(duì)速度調(diào)節(jié)的具體要求與行駛速度的實(shí)際情況,提出了模糊參數(shù)自整定的模糊控制方法,實(shí)驗(yàn)證明,該方法克服了傳統(tǒng)模糊控制的局限性,更適合智能車的速度調(diào)節(jié)。
- 基于DDPG算法的智能車匯流模型 7次下載
- 如何使用Kinetis K60進(jìn)行智能車的控制系統(tǒng)設(shè)計(jì)資料概述 20次下載
- 如何設(shè)計(jì)一個(gè)具有路徑記憶功能的智能車控制系統(tǒng)的資料概述 16次下載
- 一種自動(dòng)循跡智能車控制系統(tǒng) 2次下載
- 智能車競(jìng)賽中直流電機(jī)調(diào)速系統(tǒng)的設(shè)計(jì)與比較 10次下載
- 基于模糊控制的智能車調(diào)速系統(tǒng)的設(shè)計(jì) 2次下載
- 基于視覺的智能車模糊PID控制算法 3次下載
- 基于免疫自適應(yīng)PID的智能車模糊控制 13次下載
- 直流調(diào)速系統(tǒng)的模糊PID控制器設(shè)計(jì)實(shí)現(xiàn) 23次下載
- 基于模糊PID控制的變頻調(diào)速恒壓供水控制系統(tǒng) 35次下載
- 智能車控制系統(tǒng)電路 0次下載
- 飛思卡爾智能車控制系統(tǒng)設(shè)計(jì) 164次下載
- 基于單目視覺的智能車速度模糊控制系統(tǒng)
- 基于路徑識(shí)別的智能車系統(tǒng)設(shè)計(jì)
- 基于單目視覺的智能車速度模糊控制系統(tǒng)
- 基于機(jī)器視覺的智能車系統(tǒng) 1633次閱讀
- 圖像分類法實(shí)現(xiàn)智能車找路功能 1604次閱讀
- 基于MC68S912DP256芯片實(shí)現(xiàn)智能車導(dǎo)航系統(tǒng)的設(shè)計(jì) 2188次閱讀
- 基于ATMEGA16單片機(jī)和CCD傳感器實(shí)現(xiàn)智能車狀態(tài)實(shí)時(shí)監(jiān)測(cè)系統(tǒng)的設(shè)計(jì) 2821次閱讀
- 微雪電子智能車Arduino AlphaBot2簡(jiǎn)介 2083次閱讀
- 微雪電子智能車學(xué)習(xí)板配件包Arduino開發(fā)板簡(jiǎn)介 1388次閱讀
- 微雪電子樹莓派 Arduino 智能車擴(kuò)展套件介紹 2218次閱讀
- 汽車的智能車身控制系統(tǒng)功能介紹 7457次閱讀
- 智能車中雙排傳感器的優(yōu)勢(shì)及特點(diǎn)介紹 727次閱讀
- 光電傳感器對(duì)智能車的控制設(shè)計(jì) 1804次閱讀
- 創(chuàng)建智能車機(jī)器人smartcar的步驟教程詳解 4339次閱讀
- 基于模糊控制算法的智能車轉(zhuǎn)向舵機(jī)控制 1.1w次閱讀
- 智能車舵機(jī)控制算法詳解 2.9w次閱讀
- 智能車速度控制pid(電機(jī)閉環(huán)控制算法) 5.2w次閱讀
- 三軸加速度傳感器在智能車控制與道路識(shí)別中的應(yīng)用 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 2開關(guān)電源基礎(chǔ)知識(shí)
- 5.73 MB | 11次下載 | 免費(fèi)
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設(shè)計(jì)
- 0.60 MB | 3次下載 | 免費(fèi)
- 5DIY動(dòng)手組裝LED電子顯示屏
- 0.98 MB | 3次下載 | 免費(fèi)
- 6基于FPGA的C8051F單片機(jī)開發(fā)板設(shè)計(jì)
- 0.70 MB | 2次下載 | 免費(fèi)
- 751單片機(jī)PM2.5檢測(cè)系統(tǒng)程序
- 0.83 MB | 2次下載 | 免費(fèi)
- 8基于51單片機(jī)的RGB調(diào)色燈程序仿真
- 0.86 MB | 2次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537797次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191186次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論