 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
目前工業自動化水平已成為衡量各行各業現代化水平的一個重要標志。同時,控制理論的發展也經歷了古典控制理論、現代控制理論和智能控制理論三個階段。自動控制系統可分為開環控制系統和閉環控制系統。一個控制系統包括控制器﹑傳感器﹑變送器﹑執行機構﹑輸入輸出接口。控制器的輸出經過輸出接口﹑執行機構,加到被控系統上;控制系統的被控量,經過傳感器,變送器,通過輸入接口送到控制器。不同的控制系統,其傳感器﹑變送器﹑執行機構是不一樣的。目前,PID控制及其控制器或智能PID控制器(儀表)已經很多,產品已在工程實際中得到了廣泛的應用,有各種各樣的PID控制器產品,各大公司均開發了具有PID參數自整定功能的智能調節器,其中PID控制器參數的自動調整是通過智能化調整或自校正、自適應算法來實現。有利用PID控制實現的壓力、溫度、流量、液位控制器,能實現PID控制功能的可編程控制器(PLC),還有可實現PID控制的PC系統等等。
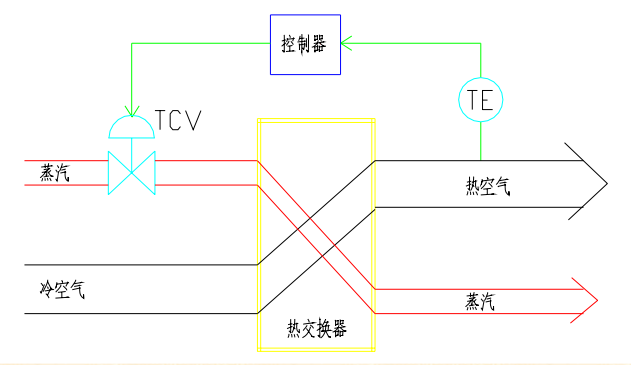
1.1 開環控制系統開環控制系統是指被控對象的輸出 (被控制量 )對控制器的輸出沒有影響。在這種控制系統中,不依賴將被控量反送回來以形成任何閉環回路。 1.2 閉環控制系統閉環控制系統的特點是系統被控對象的輸出 (被控制量 )會反送回來影響控制器的輸出,形成一個或多個閉環。閉環控制系統有正反饋和負反饋,若反饋信號與系統給定值信號相反,則稱為負反饋,若極性相同,則稱為正反饋,一般閉環控制系統均采用負反饋,又稱負反饋控制系統。 1.3 階躍響應階躍響應是指將一個階躍輸入加到系統上時,系統的輸出。穩態誤差是指系統的響應進入穩態后,系統的期望輸出與實際輸出之差。控制系統的性能可以用穩、準、快三個字來描述。穩是指系統的穩定性,一個系統要能正常工作,首先必須是穩定的,從階躍響應上看應該是收斂的;準是指控制系統的準確性、控制精度,通常用穩態誤差來描述,它表示系統輸出穩態值與期望值之差;快是指控制系統響應的快速性,通常用上升時間來定量描述。 1.4 PID控制的原理和特點在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器問世至今已有近70 年歷史,它以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型時,控制理論的其它技術難以采用時,系統控制器的結構和參數必須依靠經驗和現場調試來確定,這時應用PID控制技術最為方便。即當我們不完全了解一個系統和被控對象,或不能通過有效的測量手段來獲得系統參數時,最適合用PID控制技術。PID控制,實際中也有PI和PD控制。PID控制器就是根據系統的誤差,利用比例、積分、微分計算出控制量進行控制的。比例(P)控制比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關系。偏差一旦產生,控制器立即就發生作用即調節控制輸出,使被控量朝著減小偏差的方向變化,偏差減小的速度取決于比例系數Kp,Kp越大偏差減小的越快,但是很容易引起振蕩,尤其是在遲滯環節比較大的情況下,Kp減小,發生振蕩的可能性減小但是調節速度變慢。但單純的比例控制存在穩態誤差不能消除的缺點。這里就需要積分控制。積分(I)控制在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關系。對一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個控制系統是有穩態誤差的或簡稱有差系統。為了消除穩態誤差,在控制器中必須引入“積分項”。積分項對誤差取決于時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩態誤差進一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統在進入穩態后無穩態誤差。實質就是對偏差累積進行控制,直至偏差為零。積分控制作用始終施加指向給定值的作用力,有利于消除靜差,其效果不僅與偏差大小有關,而且還與偏差持續的時間有關。簡單來說就是把偏差積累起來,一起算總帳。微分(D)控制在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關系。自動控制系統在克服誤差的調節過程中可能會出現振蕩甚至失穩。其原因是由于存在有較大慣性組件(環節)或有滯后組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應該是零。這就是說,在控制器中僅引入 “比例 ”項往往是不夠的,比例項的作用僅是放大誤差的幅值,而目前需要增加的是 “微分項 ”,它能預測誤差變化的趨勢,這樣,具有比例 +微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負值,從而避免了被控量的嚴重超調。所以對有較大慣性或滯后的被控對象,比例 +微分(PD)控制器能改善系統在調節過程中的動態特性。它能敏感出誤差的變化趨勢,可在誤差信號出現之前就起到修正誤差的作用,有利于提高輸出響應的快速性,減小被控量的超調和增加系統的穩定性。但微分作用很容易放大高頻噪聲,降低系統的信噪比,從而使系統抑制干擾的能力下降。
- 經典的PID控制技術圖書《Advanced PID Control》pdf 0次下載
- PID控制原理圖 34次下載
- PID控制中如何整定PID參數 67次下載
- PID調節控制電機速度控制系統文件下載 48次下載
- Python的入門經典實例免費下載 40次下載
- 使用單片機和Arduino實現增量式PID位置式PID算法和PID庫免費下載 69次下載
- 先進PID控制MATLAB的仿真程序免費下載 10次下載
- LabVIEW的溫度PID控制資料免費下載 78次下載
- 控制理論的經典復習題資料合集免費下載 2次下載
- PID水量控制仿真演示軟件免費下載 4次下載
- 數字PID控制直流電機程序清單資料合集免費下載 23次下載
- 電氣維修上崗培訓試題的詳細資料免費下載 25次下載
- PID控制經典培訓教程 9次下載
- PID控制經典PPT 32次下載
- PID控制經典培訓教程 26次下載
- PID控制的原理與作用 3855次閱讀
- PID在工業控制領域的應用 1241次閱讀
- 飛行控制PID算法的作用解析 1858次閱讀
- PID控制算法詳解(二) 1872次閱讀
- PID控制器概述與制作實例 5887次閱讀
- 一文總結萬能的PID算法 3978次閱讀
- PID控制算法原理、方法概述 9579次閱讀
- 什么是PID控制? 3.2w次閱讀
- pid控制器工作原理 1.1w次閱讀
- 模擬電路設計之PID控制策略 1w次閱讀
- 過程控制中的PID控制技術 8219次閱讀
- 學會PID控制是自控技術入門的必要 5882次閱讀
- 淺析PID算法的控制原理和特點 1w次閱讀
- pid控制器的輸入輸出_PID控制器的控制實現 2.8w次閱讀
- 基于MatIab的模糊PID控制系統設計及仿真 1.8w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 11次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5DIY動手組裝LED電子顯示屏
- 0.98 MB | 3次下載 | 免費
- 6基于FPGA的C8051F單片機開發板設計
- 0.70 MB | 2次下載 | 免費
- 751單片機PM2.5檢測系統程序
- 0.83 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537797次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191186次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論