 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
眾所周知,直流電動(dòng)機(jī)調(diào)速性能好,但存在機(jī)械換向裝置易造成換向火花、電磁干擾及需要定期維護(hù)等不足;同步電動(dòng)機(jī)效率高,功率因數(shù)可調(diào),但存在啟動(dòng)困難,重載時(shí)易振蕩失步等問題。
隨著電力電子技術(shù)、計(jì)算機(jī)技術(shù)和新型永磁材料的不斷發(fā)展,為提出一種利用電子換向原理實(shí)現(xiàn)永磁無刷電動(dòng)機(jī)控制創(chuàng)造了條件。特別是近幾年推出的數(shù)字信號(hào)處理器(DSP)芯片,解決了原來微處理器結(jié)構(gòu)復(fù)雜,單片微處理速度達(dá)不到實(shí)時(shí)系統(tǒng)控制的要求,為無刷電動(dòng)機(jī)的復(fù)雜算法提供了軟硬件基礎(chǔ)。
1 系統(tǒng)結(jié)構(gòu)和工作原理
無刷電動(dòng)機(jī)屬于一種自控同步電動(dòng)機(jī),它主要由DSP電機(jī)專用高速處理器芯片、轉(zhuǎn)子位置傳感器、邏輯驅(qū)動(dòng)電路、功率電子開關(guān)、電流和電壓檢測(cè)等裝置組成。DSP控制的無刷電動(dòng)機(jī)系統(tǒng)結(jié)構(gòu)如圖1所示。其中,無刷電動(dòng)機(jī)定子繞組為星形接法;DSP控制芯片ADMCF328驅(qū)動(dòng)專用集成芯片IR2130;逆變橋采用三相橋式電路;轉(zhuǎn)子位置檢測(cè)器利用霍爾元件檢測(cè),并利用位置信號(hào)估算轉(zhuǎn)子的轉(zhuǎn)速,以實(shí)現(xiàn)轉(zhuǎn)速閉環(huán)控制。
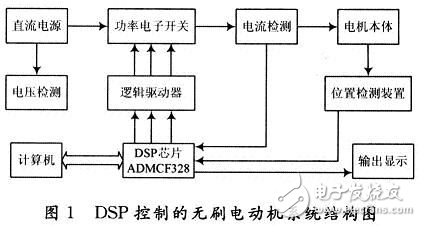
無刷電動(dòng)機(jī)的轉(zhuǎn)子采用永磁體,產(chǎn)生直軸位置的勵(lì)磁磁場(chǎng),定子為電樞繞組,通過功率控制器控制各相繞組的通斷狀態(tài)而產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。設(shè)計(jì)無刷電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)的關(guān)鍵是如果選擇轉(zhuǎn)子位置檢測(cè)器,當(dāng)電動(dòng)機(jī)定子電樞系統(tǒng)直接由轉(zhuǎn)子轉(zhuǎn)速控制。當(dāng)電動(dòng)機(jī)速度降低時(shí),位置檢測(cè)器的輸出信號(hào)頻率也降低,電樞電流頻率及其旋轉(zhuǎn)磁場(chǎng)的速度也隨之降低,但若使電樞磁場(chǎng)與勵(lì)磁磁場(chǎng)的相對(duì)位置仍保持不變,則電動(dòng)機(jī)就不會(huì)失步。同時(shí),由無刷電動(dòng)機(jī)調(diào)速特性可知,調(diào)節(jié)直流電壓Ud的大小,可以改變電動(dòng)機(jī)的轉(zhuǎn)速性能,這與有刷直流電動(dòng)機(jī)有相似的機(jī)械特性。
2 控制系統(tǒng)硬件設(shè)計(jì)
2.1 控制系統(tǒng)設(shè)計(jì)
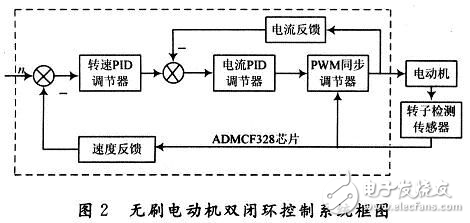
電動(dòng)機(jī)控制系統(tǒng)采用速度外環(huán)和電流內(nèi)環(huán)的雙閉環(huán)控制,兩個(gè)反饋環(huán)節(jié)的調(diào)節(jié)器都采用PID數(shù)字調(diào)節(jié)器,如圖2所示。計(jì)算電動(dòng)機(jī)轉(zhuǎn)子轉(zhuǎn)速的目的是為了實(shí)現(xiàn)轉(zhuǎn)速調(diào)節(jié)和計(jì)算出電樞電流的指令值。在直流母線上采集電流調(diào)節(jié)器的采樣信號(hào),采樣信號(hào)與前端值比較計(jì)算后輸出給PWM同步調(diào)節(jié)器。電流調(diào)節(jié)器、速度調(diào)節(jié)器的計(jì)算除了調(diào)節(jié)器設(shè)定的PID參數(shù)KP,kI和kD外,還要設(shè)定PWM周期參數(shù)等。
2.2 DSP控制板
DSP控制板由ADI公司生產(chǎn)的專用DSP芯片ADMCF328、硬件控制與恢復(fù)電路等組成。ADM-CF、328芯片具有強(qiáng)大、快速的處理能力,主要完成控制算法的處理、PWM輸出、模/數(shù)轉(zhuǎn)換、與上位機(jī)通信和輸出顯示等功能。
該芯片只有28個(gè)外部引腳,縮小了控制板尺寸,提高了系統(tǒng)的可靠性,而且具有價(jià)格低等優(yōu)點(diǎn)。芯片的內(nèi)部集成了一個(gè)具有反向功能的5倍放大器,用于精確的電流采樣,實(shí)現(xiàn)電流的閉環(huán)控制。芯片與IR2130驅(qū)動(dòng)電路、轉(zhuǎn)子位置檢測(cè)器、鍵盤和計(jì)算機(jī)等外設(shè)備連接,可實(shí)現(xiàn)無刷電動(dòng)機(jī)的實(shí)時(shí)控制和運(yùn)行監(jiān)視。
2.3 轉(zhuǎn)子位置檢測(cè)器
轉(zhuǎn)子位置檢測(cè)器是無刷電動(dòng)機(jī)的重要組成部分,常用的轉(zhuǎn)子位置檢測(cè)器有電磁感應(yīng)式、光電式、霍爾開關(guān)式和接近開關(guān)式。高性能的無刷電機(jī)位置檢測(cè)器、磁電碼盤和旋轉(zhuǎn)變壓器式,可根據(jù)實(shí)際控制系統(tǒng)的要求予以選擇。
該系統(tǒng)選用霍爾開關(guān)式轉(zhuǎn)子位置檢測(cè)器,具有性價(jià)比高的特點(diǎn)。它的工作原理是:在霍爾元件的輸入端通入控制電流,當(dāng)霍爾元件受到外磁場(chǎng)作用時(shí),輸出端便有了信號(hào)輸出,根據(jù)霍爾元件的控制信號(hào)便可判斷轉(zhuǎn)子磁極的位置。同時(shí)利用定時(shí)器確定相鄰兩次霍爾位置狀態(tài)變化所需的時(shí)間,就可以估算出轉(zhuǎn)子的實(shí)際轉(zhuǎn)數(shù)和轉(zhuǎn)向。
3 控制系統(tǒng)軟件設(shè)計(jì)
控制系統(tǒng)軟件設(shè)計(jì)與上述硬件電路密切相關(guān)。軟件程序設(shè)計(jì)主要包括主程序和中斷服務(wù)子程序。主程序主要完成ADFVCF328的初始化、變量與常量參數(shù)的設(shè)置等。主程序?qū)嶋H上是進(jìn)入一個(gè)查詢過程,程序不斷查詢電壓狀態(tài)、電流狀態(tài),更新標(biāo)志并調(diào)入換相服務(wù)子程序,給電動(dòng)機(jī)相應(yīng)的定子繞組通電。中斷服務(wù)子程序主要完成ADC轉(zhuǎn)換,測(cè)量電機(jī)定子電流、直流電壓、PID數(shù)字比較運(yùn)算,確定PWM占空比、PMW周期中斷,計(jì)算及更新PWM寄存器的值。軟件程序設(shè)計(jì)還要考慮轉(zhuǎn)子位置傳感器、霍爾元件信號(hào)接口的初始化及功能設(shè)計(jì)、PID數(shù)字反饋系統(tǒng)的參數(shù)設(shè)定等。
隨著電力電子技術(shù)、計(jì)算機(jī)技術(shù)和新型永磁材料的不斷發(fā)展,為提出一種利用電子換向原理實(shí)現(xiàn)永磁無刷電動(dòng)機(jī)控制創(chuàng)造了條件。特別是近幾年推出的數(shù)字信號(hào)處理器(DSP)芯片,解決了原來微處理器結(jié)構(gòu)復(fù)雜,單片微處理速度達(dá)不到實(shí)時(shí)系統(tǒng)控制的要求,為無刷電動(dòng)機(jī)的復(fù)雜算法提供了軟硬件基礎(chǔ)。
1 系統(tǒng)結(jié)構(gòu)和工作原理
無刷電動(dòng)機(jī)屬于一種自控同步電動(dòng)機(jī),它主要由DSP電機(jī)專用高速處理器芯片、轉(zhuǎn)子位置傳感器、邏輯驅(qū)動(dòng)電路、功率電子開關(guān)、電流和電壓檢測(cè)等裝置組成。DSP控制的無刷電動(dòng)機(jī)系統(tǒng)結(jié)構(gòu)如圖1所示。其中,無刷電動(dòng)機(jī)定子繞組為星形接法;DSP控制芯片ADMCF328驅(qū)動(dòng)專用集成芯片IR2130;逆變橋采用三相橋式電路;轉(zhuǎn)子位置檢測(cè)器利用霍爾元件檢測(cè),并利用位置信號(hào)估算轉(zhuǎn)子的轉(zhuǎn)速,以實(shí)現(xiàn)轉(zhuǎn)速閉環(huán)控制。
無刷電動(dòng)機(jī)的轉(zhuǎn)子采用永磁體,產(chǎn)生直軸位置的勵(lì)磁磁場(chǎng),定子為電樞繞組,通過功率控制器控制各相繞組的通斷狀態(tài)而產(chǎn)生旋轉(zhuǎn)磁場(chǎng)。設(shè)計(jì)無刷電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)的關(guān)鍵是如果選擇轉(zhuǎn)子位置檢測(cè)器,當(dāng)電動(dòng)機(jī)定子電樞系統(tǒng)直接由轉(zhuǎn)子轉(zhuǎn)速控制。當(dāng)電動(dòng)機(jī)速度降低時(shí),位置檢測(cè)器的輸出信號(hào)頻率也降低,電樞電流頻率及其旋轉(zhuǎn)磁場(chǎng)的速度也隨之降低,但若使電樞磁場(chǎng)與勵(lì)磁磁場(chǎng)的相對(duì)位置仍保持不變,則電動(dòng)機(jī)就不會(huì)失步。同時(shí),由無刷電動(dòng)機(jī)調(diào)速特性可知,調(diào)節(jié)直流電壓Ud的大小,可以改變電動(dòng)機(jī)的轉(zhuǎn)速性能,這與有刷直流電動(dòng)機(jī)有相似的機(jī)械特性。
2 控制系統(tǒng)硬件設(shè)計(jì)
2.1 控制系統(tǒng)設(shè)計(jì)
電動(dòng)機(jī)控制系統(tǒng)采用速度外環(huán)和電流內(nèi)環(huán)的雙閉環(huán)控制,兩個(gè)反饋環(huán)節(jié)的調(diào)節(jié)器都采用PID數(shù)字調(diào)節(jié)器,如圖2所示。計(jì)算電動(dòng)機(jī)轉(zhuǎn)子轉(zhuǎn)速的目的是為了實(shí)現(xiàn)轉(zhuǎn)速調(diào)節(jié)和計(jì)算出電樞電流的指令值。在直流母線上采集電流調(diào)節(jié)器的采樣信號(hào),采樣信號(hào)與前端值比較計(jì)算后輸出給PWM同步調(diào)節(jié)器。電流調(diào)節(jié)器、速度調(diào)節(jié)器的計(jì)算除了調(diào)節(jié)器設(shè)定的PID參數(shù)KP,kI和kD外,還要設(shè)定PWM周期參數(shù)等。
2.2 DSP控制板
DSP控制板由ADI公司生產(chǎn)的專用DSP芯片ADMCF328、硬件控制與恢復(fù)電路等組成。ADM-CF、328芯片具有強(qiáng)大、快速的處理能力,主要完成控制算法的處理、PWM輸出、模/數(shù)轉(zhuǎn)換、與上位機(jī)通信和輸出顯示等功能。
該芯片只有28個(gè)外部引腳,縮小了控制板尺寸,提高了系統(tǒng)的可靠性,而且具有價(jià)格低等優(yōu)點(diǎn)。芯片的內(nèi)部集成了一個(gè)具有反向功能的5倍放大器,用于精確的電流采樣,實(shí)現(xiàn)電流的閉環(huán)控制。芯片與IR2130驅(qū)動(dòng)電路、轉(zhuǎn)子位置檢測(cè)器、鍵盤和計(jì)算機(jī)等外設(shè)備連接,可實(shí)現(xiàn)無刷電動(dòng)機(jī)的實(shí)時(shí)控制和運(yùn)行監(jiān)視。
2.3 轉(zhuǎn)子位置檢測(cè)器
轉(zhuǎn)子位置檢測(cè)器是無刷電動(dòng)機(jī)的重要組成部分,常用的轉(zhuǎn)子位置檢測(cè)器有電磁感應(yīng)式、光電式、霍爾開關(guān)式和接近開關(guān)式。高性能的無刷電機(jī)位置檢測(cè)器、磁電碼盤和旋轉(zhuǎn)變壓器式,可根據(jù)實(shí)際控制系統(tǒng)的要求予以選擇。
該系統(tǒng)選用霍爾開關(guān)式轉(zhuǎn)子位置檢測(cè)器,具有性價(jià)比高的特點(diǎn)。它的工作原理是:在霍爾元件的輸入端通入控制電流,當(dāng)霍爾元件受到外磁場(chǎng)作用時(shí),輸出端便有了信號(hào)輸出,根據(jù)霍爾元件的控制信號(hào)便可判斷轉(zhuǎn)子磁極的位置。同時(shí)利用定時(shí)器確定相鄰兩次霍爾位置狀態(tài)變化所需的時(shí)間,就可以估算出轉(zhuǎn)子的實(shí)際轉(zhuǎn)數(shù)和轉(zhuǎn)向。
3 控制系統(tǒng)軟件設(shè)計(jì)
控制系統(tǒng)軟件設(shè)計(jì)與上述硬件電路密切相關(guān)。軟件程序設(shè)計(jì)主要包括主程序和中斷服務(wù)子程序。主程序主要完成ADFVCF328的初始化、變量與常量參數(shù)的設(shè)置等。主程序?qū)嶋H上是進(jìn)入一個(gè)查詢過程,程序不斷查詢電壓狀態(tài)、電流狀態(tài),更新標(biāo)志并調(diào)入換相服務(wù)子程序,給電動(dòng)機(jī)相應(yīng)的定子繞組通電。中斷服務(wù)子程序主要完成ADC轉(zhuǎn)換,測(cè)量電機(jī)定子電流、直流電壓、PID數(shù)字比較運(yùn)算,確定PWM占空比、PMW周期中斷,計(jì)算及更新PWM寄存器的值。軟件程序設(shè)計(jì)還要考慮轉(zhuǎn)子位置傳感器、霍爾元件信號(hào)接口的初始化及功能設(shè)計(jì)、PID數(shù)字反饋系統(tǒng)的參數(shù)設(shè)定等。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- DSP在無刷直流電動(dòng)機(jī)中的應(yīng)用
- 基于DSP控制無傳感器的無刷直流電動(dòng)機(jī)調(diào)速系統(tǒng)
- 基于DSP的無刷直流電動(dòng)機(jī)PID控制系統(tǒng) 5次下載
- 基于DSP軟件示波器的無刷直流電機(jī)控制系統(tǒng) 28次下載
- 如何利用DSP控制電動(dòng)機(jī)?《電動(dòng)機(jī)的DSP控制》電子教材免費(fèi)下載 204次下載
- 基于DSP的雙電動(dòng)機(jī)同步控制平臺(tái)設(shè)計(jì)解析 6次下載
- 基于DSP嵌入式技術(shù)的無刷直流電動(dòng)機(jī)智能控制系統(tǒng)的研究_侯玉寶 8次下載
- 基于TMS320LF2407的無刷直流電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì) 8次下載
- 無刷直流電動(dòng)機(jī)及其控制系統(tǒng) 16次下載
- 無位置傳感器無刷直流電動(dòng)機(jī)控制方法及其DSP實(shí)現(xiàn) 269次下載
- 直流無刷電動(dòng)機(jī)原理與技術(shù)應(yīng)用
- 基于ST72141芯片的無刷直流電動(dòng)機(jī)控制系統(tǒng)
- 基于DSP的無刷直流電機(jī)物傳感器控制系統(tǒng)設(shè)計(jì)
- 基于DSP 技術(shù)的無位置傳感器的無刷直流電動(dòng)機(jī)控制
- 基于DSP的無刷直流電動(dòng)機(jī)控制系統(tǒng)
- 電動(dòng)機(jī)的常規(guī)控制方法 1557次閱讀
- 無刷直流電動(dòng)機(jī)的故障模式 1032次閱讀
- 電動(dòng)機(jī)的分類方法 4467次閱讀
- 設(shè)計(jì)一個(gè)PLC控制電動(dòng)機(jī)正停反的控制系統(tǒng) 4490次閱讀
- 基于TMS320F28335處理器實(shí)現(xiàn)驅(qū)動(dòng)雙電動(dòng)機(jī)同步控制系統(tǒng)的設(shè)計(jì) 6390次閱讀
- 實(shí)現(xiàn)無刷直流永磁電動(dòng)機(jī)正反轉(zhuǎn) 5844次閱讀
- 無刷直流電機(jī)與永磁同步電動(dòng)機(jī)的工作原理 3.3w次閱讀
- 新日本無線三相DC無刷電動(dòng)機(jī)控制IC NJW4303性能特征解析 1905次閱讀
- PLC控制電動(dòng)機(jī)正停反的控制系統(tǒng)設(shè)計(jì) 1.1w次閱讀
- 永磁直流無刷電動(dòng)機(jī)的結(jié)構(gòu)詳解 2.1w次閱讀
- 帶你了解永磁無刷直流電動(dòng)機(jī)的企業(yè)標(biāo)準(zhǔn) 4427次閱讀
- 淺談電磁干擾原理 無刷直流電動(dòng)機(jī)控制系統(tǒng)電磁兼容設(shè)計(jì) 8274次閱讀
- 89C51單片機(jī)的步進(jìn)電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì) 1.4w次閱讀
- 基于DSP的電動(dòng)機(jī)電磁兼容設(shè)計(jì) 893次閱讀
- OPTIMUS應(yīng)用于電動(dòng)機(jī)控制系統(tǒng)優(yōu)化技術(shù) 1138次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DC電源插座圖紙
- 0.67 MB | 2次下載 | 免費(fèi)
- 2AN158 GD32VW553 Wi-Fi開發(fā)指南
- 1.51MB | 2次下載 | 免費(fèi)
- 3AN148 GD32VW553射頻硬件開發(fā)指南
- 2.07MB | 1次下載 | 免費(fèi)
- 4AN111-LTC3219用戶指南
- 84.32KB | 次下載 | 免費(fèi)
- 5AN153-用于電源系統(tǒng)管理的Linduino
- 1.38MB | 次下載 | 免費(fèi)
- 6AN-283: Σ-Δ型ADC和DAC[中文版]
- 677.86KB | 次下載 | 免費(fèi)
- 7SM2018E 支持可控硅調(diào)光線性恒流控制芯片
- 402.24 KB | 次下載 | 免費(fèi)
- 8AN-1308: 電流檢測(cè)放大器共模階躍響應(yīng)
- 545.42KB | 次下載 | 免費(fèi)
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 450次下載 | 免費(fèi)
- 2免費(fèi)開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 138次下載 | 1 積分
- 3基于STM32單片機(jī)智能手環(huán)心率計(jì)步器體溫顯示設(shè)計(jì)
- 0.10 MB | 130次下載 | 免費(fèi)
- 4使用單片機(jī)實(shí)現(xiàn)七人表決器的程序和仿真資料免費(fèi)下載
- 2.96 MB | 44次下載 | 免費(fèi)
- 53314A函數(shù)發(fā)生器維修手冊(cè)
- 16.30 MB | 31次下載 | 免費(fèi)
- 6美的電磁爐維修手冊(cè)大全
- 1.56 MB | 24次下載 | 5 積分
- 7如何正確測(cè)試電源的紋波
- 0.36 MB | 17次下載 | 免費(fèi)
- 8感應(yīng)筆電路圖
- 0.06 MB | 10次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論