 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
基于MCU和DSP的運動控制系統(tǒng)由于結構緊湊、環(huán)境適應性好而有良好的發(fā)展前景。由于PC機與MCU和DSP資源環(huán)境差異較大, 進行MCU和DSP環(huán)境中的運動控制技術研究十分必要。
基于MCU和DSP的運動控制研究硬件平臺設計遵從運動控制系統(tǒng)的開放式、可重構和網絡化的發(fā)展方向, 選用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 適應信息網、控制網和伺服網(接口) 網絡化需求, 采用雙層、組合式模式, 實現了一個實用可靠的硬件環(huán)境。它可以進行單CPU、并行雙CPU和層次化多CPU的運動控制算法和系統(tǒng)支撐軟件的研究。
引言
開放式控制器體系結構源于“開放式”的PC(個人計算機) 技術, 目前的開放式運動控制器多為PC+運動控制卡結構, 隨著MCU(微控制器) 和DSP(數字信號處理器)性能的增強, MUC和DSP取代PC的趨勢日趨明顯, 而這種嵌入式的緊湊結構較PC有更廣泛的環(huán)境適應性。MCU、DSP和PC差異較大, PC環(huán)境中的運動控制技術不可能直接向MCU和DSP系統(tǒng)中轉移, 基于MCU和DSP硬件平臺的運動控制技術的研究十分必要。
設計目標與需求分析
運動控制系統(tǒng)發(fā)展方向
在開放式控制器技術的推動下, 運動控制系統(tǒng)由傳統(tǒng)的封閉式結構朝著開放、可重構、網絡化方向發(fā)展。按照《開放式數控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開放式數控系統(tǒng)有三個層次的開放, 第一層, 系統(tǒng)功能可配置, 人機界面、伺服驅動單元的運動控制接口、邏輯控制單元接口均開放; 第二層, 系統(tǒng)軟件體系結構、拓撲結構和應用軟件接口開放, 第三方的應用軟件能在系統(tǒng)中安裝運行并實現互操作性, 且第三方的軟件模塊可以在拓撲結構不變的情況下對本系統(tǒng)軟件模塊置換和擴展; 第三層, 系統(tǒng)實現可重構。國標GB/T 18759.1- 2002 尚未公布可重構的詳細內容。運動控制系統(tǒng)是數控系統(tǒng)的一個核心組件, 其技術發(fā)展方向和開放式數控系統(tǒng)類似。現代運動控制器聯通信息網、邏輯控制網和伺服控制網(接口) 三種網絡。
在MCU 和DSP 環(huán)境中運動控制技術的研究課題
和PC相比, MCU和DSP采用了哈佛結構, 流水線技術, 超長指令字, 加乘器等提高CPU速度, 并在片上擴展了控制用前向和后向通道外設及通信接口, 在這種環(huán)境下, 實現開放、可重構和網絡化運動控制功能, 下列研究是必要的:
①體系結構的研究, 以多CPU方式實現復雜的運動控制;
②嵌入式系統(tǒng)中實時操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問題;
③MCU和DSP環(huán)境中運動控制算法的研究, 解決少資源情況下, 復雜控制算法的實現問題;
④軟件模塊管理與剪裁技術的研究, 解決通用技術方案的應用針對性問題;
⑤網絡通信技術的研究:解決伺服通信網、邏輯控制網和信息網通信問題。
硬件系統(tǒng)設計目標與結構要求
基于MCU和DSP的運動控制技術研究硬件平臺的設計目標是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運動控制器并不少見,但它們只對用戶提供運動控制函數庫的接口, 并不是完全意義上的開放, 必須開發(fā)運動控制器的硬件研究平臺, 并滿足下列要求:
①類型與結構化模式要求:CPU選型應是主流的MCU和DSP芯片,結構體系采用單CPU,雙CPU流水線模式和層次化結構, CPU可以獨立工作, 可以組成流水線模式工作。也可以采用兩層結構,上下層分別處理不同實時要求的任務。
②開放性要求:各CPU單元配置計算機通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實現硬件互聯。
③網絡化要求:配有伺服單元接口、現場總線接口和以太網接口。
系統(tǒng)設計
運動控制系統(tǒng)硬件結構
運動控制系統(tǒng)硬件基本結構如圖1 所示:
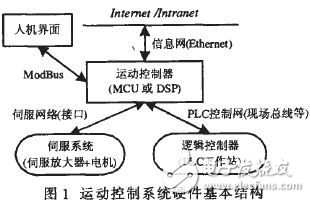
基于MCU和DSP的運動控制研究硬件平臺設計遵從運動控制系統(tǒng)的開放式、可重構和網絡化的發(fā)展方向, 選用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 適應信息網、控制網和伺服網(接口) 網絡化需求, 采用雙層、組合式模式, 實現了一個實用可靠的硬件環(huán)境。它可以進行單CPU、并行雙CPU和層次化多CPU的運動控制算法和系統(tǒng)支撐軟件的研究。
引言
開放式控制器體系結構源于“開放式”的PC(個人計算機) 技術, 目前的開放式運動控制器多為PC+運動控制卡結構, 隨著MCU(微控制器) 和DSP(數字信號處理器)性能的增強, MUC和DSP取代PC的趨勢日趨明顯, 而這種嵌入式的緊湊結構較PC有更廣泛的環(huán)境適應性。MCU、DSP和PC差異較大, PC環(huán)境中的運動控制技術不可能直接向MCU和DSP系統(tǒng)中轉移, 基于MCU和DSP硬件平臺的運動控制技術的研究十分必要。
設計目標與需求分析
運動控制系統(tǒng)發(fā)展方向
在開放式控制器技術的推動下, 運動控制系統(tǒng)由傳統(tǒng)的封閉式結構朝著開放、可重構、網絡化方向發(fā)展。按照《開放式數控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開放式數控系統(tǒng)有三個層次的開放, 第一層, 系統(tǒng)功能可配置, 人機界面、伺服驅動單元的運動控制接口、邏輯控制單元接口均開放; 第二層, 系統(tǒng)軟件體系結構、拓撲結構和應用軟件接口開放, 第三方的應用軟件能在系統(tǒng)中安裝運行并實現互操作性, 且第三方的軟件模塊可以在拓撲結構不變的情況下對本系統(tǒng)軟件模塊置換和擴展; 第三層, 系統(tǒng)實現可重構。國標GB/T 18759.1- 2002 尚未公布可重構的詳細內容。運動控制系統(tǒng)是數控系統(tǒng)的一個核心組件, 其技術發(fā)展方向和開放式數控系統(tǒng)類似。現代運動控制器聯通信息網、邏輯控制網和伺服控制網(接口) 三種網絡。
在MCU 和DSP 環(huán)境中運動控制技術的研究課題
和PC相比, MCU和DSP采用了哈佛結構, 流水線技術, 超長指令字, 加乘器等提高CPU速度, 并在片上擴展了控制用前向和后向通道外設及通信接口, 在這種環(huán)境下, 實現開放、可重構和網絡化運動控制功能, 下列研究是必要的:
①體系結構的研究, 以多CPU方式實現復雜的運動控制;
②嵌入式系統(tǒng)中實時操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問題;
③MCU和DSP環(huán)境中運動控制算法的研究, 解決少資源情況下, 復雜控制算法的實現問題;
④軟件模塊管理與剪裁技術的研究, 解決通用技術方案的應用針對性問題;
⑤網絡通信技術的研究:解決伺服通信網、邏輯控制網和信息網通信問題。
硬件系統(tǒng)設計目標與結構要求
基于MCU和DSP的運動控制技術研究硬件平臺的設計目標是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運動控制器并不少見,但它們只對用戶提供運動控制函數庫的接口, 并不是完全意義上的開放, 必須開發(fā)運動控制器的硬件研究平臺, 并滿足下列要求:
①類型與結構化模式要求:CPU選型應是主流的MCU和DSP芯片,結構體系采用單CPU,雙CPU流水線模式和層次化結構, CPU可以獨立工作, 可以組成流水線模式工作。也可以采用兩層結構,上下層分別處理不同實時要求的任務。
②開放性要求:各CPU單元配置計算機通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實現硬件互聯。
③網絡化要求:配有伺服單元接口、現場總線接口和以太網接口。
系統(tǒng)設計
運動控制系統(tǒng)硬件結構
運動控制系統(tǒng)硬件基本結構如圖1 所示:
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于MATLAB的DSP控制系統(tǒng)仿真平臺設計方案 20次下載
- 如何使用DSP和CPLD進行運動控制器的設計與應用資料說明 8次下載
- 基于DSP的運動控制器的探究 2次下載
- MCU+DSP嵌入式平臺的i機接口設計 0次下載
- DSP的運動控制系統(tǒng)設計 12次下載
- MCU和DSP的運動控制研究硬件平臺設計 6次下載
- 基于DSP與FPGA的運動控制器設計 30次下載
- 基于DSP的永磁平面電機運動控制系統(tǒng)研究 18次下載
- 基于DSP的多軸運動控制器的研究與設計 6次下載
- 基于DSP與FPGA的運動控制器研究 93次下載
- 基于DSP的自由曲線加工運動控制系統(tǒng)的研究 49次下載
- 基于DSP的運動控制系統(tǒng)設計
- 基于MCU和DSP的運動控制研究硬件平臺設計
- 基于DSP的運動控制器的研究與開發(fā)
- 基于DSP的無線運動控制方法
- MCU、DSP和FPGA的區(qū)別 4091次閱讀
- 全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發(fā) 737次閱讀
- 全國產EtherCAT運動控制邊緣控制器-ZMC432H 670次閱讀
- 采用ACRl505型運動控制卡實現機械自動封裝系統(tǒng)的設計 891次閱讀
- 采用ADT850運動控制卡和PC機實現多軸運動控制系統(tǒng)的設計 2523次閱讀
- MIPS平臺上運動控制器的調度抖動的測試方法設計詳解 1199次閱讀
- 簡介pmac運動控制卡 1.3w次閱讀
- MCU市場更加豐富多元,DSP/FPU不同硬件加速單元具互補作用 1737次閱讀
- 基于ARM與DSP的嵌入式運動控制器設計詳解 7265次閱讀
- 基于CPLD的開放式四軸運動控制器的硬件、軟件設計 1959次閱讀
- 智能硬件平臺有哪些_智能硬件平臺哪個最好 1.4w次閱讀
- 中穎單片機雙核(DSP和MCU)SH99F100基于工業(yè)控制中的應用 1870次閱讀
- 基于DSP的運動相機控制系統(tǒng)設計 1496次閱讀
- 基于CPLD/DSP的賽車全電防滑剎車控制器設計 1295次閱讀
- 基于DSP的覆冰機器人控制系統(tǒng)研究 603次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1489次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 91次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 9次下載 | 免費
- 6基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
- 7基于單片機和 SG3525的程控開關電源設計
- 0.23 MB | 3次下載 | 免費
- 8基于單片機的紅外風扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30319次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537791次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監(jiān)
工商網監(jiān)
評論