 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
小型無人直升機具有垂直起降、懸停、巡航以及快速轉變航向等特性,使得它成為一種理想的無人飛行器,并被廣泛地應用于除軍事目的以外的諸如交通執法監控、海洋/環境監測以及航空攝影/測量等許多領域。在進行實際自主飛行試驗時,由于小型無人直升機本身是一個極其復雜的非線性系統,加之實驗環境的變化,因此具有很大的不確定性,稍有不慎,就可能造成飛機的失控甚至墜毀。為了保證實際飛行實驗的安全,縮短開發周期,減少開發資金的投入,同時便于對飛行控制系統進行驗證與調較,設計一套小型無人直升機的實時仿真系統便顯得尤為迫切。詳細介紹了基于Linux的小型無人直升機的實時仿真系統整個搭建過程。
1 小型無人直升機實時仿真系統結構
1.1 無人直升機實時仿真系統構建
在此以Raptor90無人直升機為實驗平臺,如圖1所示。

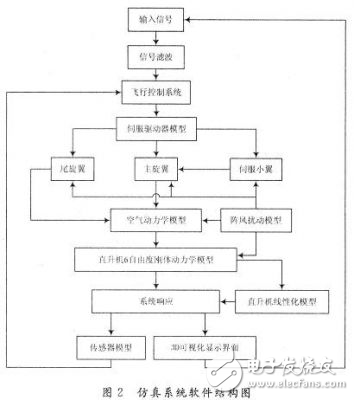
要構建一套切實可行的小型無人直升機仿真系統,需要對小型無人直升機實際飛行過程進行全面的建模。而其中對小型無人直升機系統的數學模型建模又是重中之重。這里主要利用MIT以及Aalborg大學研究人員提出的兩套無人直升機的建模方法,結合各自的優點,充分考慮無人直升機在不同模態切換之間的模型差異,對無人直升機進行數學建模,并轉換成可以實施的仿真系統模型。仿真系統主要包括直升機數學模型模塊、飛行控制系統模塊、數據融合模塊、控制輸入模塊,人機圖形界面模塊以及數據通信模塊等。其中直升機數學模型模塊主要包括:直升機非線性模型、直升機線性化模型、陣風擾動模型、地形模型、傳感器模型以及伺服驅動器模型。直升機非線性模型主要包括主旋翼、伺服小翼、尾旋翼、空氣動力學模型以及6自由度剛體動力學模型。直升機線性化模塊主要是在直升機非線性模型的基礎上根據控制需要進行適當的簡化,以便用來對線性控制器的性能進行檢驗。陣風擾動模型主要用來對小型無人直升機在實際飛行環境中的陣風進行模擬。地形模型主要考慮直升機在起飛和降落過程中與地面之間的相互作用。這當中涉及到地面與槳葉間的渦流效應,對其建模非常復雜,故這里暫時不考慮。傳感器模型主要包括GPS定位模型、IMu測量模型和聲納測距模型。伺服驅動模型主要模擬將伺服板接收到的輸入信號轉換為伺服電機的轉動并最終轉換成機械動作后直接作用于旋翼的過程。飛行控制系統模塊指利用設計的控制算法對直升機進行自主飛行控制。數據融合模塊主要指利用卡爾曼濾波算法對各個傳感器測量到的數據進行融合計算。控制輸入模塊主要用于直升機自主飛行時對其飛行狀態進行調校。人機圖形界面能生動實時地再現直升機的仿真效果。經過以上分析,可以得到小型無人直升機仿真系統的結構圖如圖2所示。
1 小型無人直升機實時仿真系統結構
1.1 無人直升機實時仿真系統構建
在此以Raptor90無人直升機為實驗平臺,如圖1所示。
要構建一套切實可行的小型無人直升機仿真系統,需要對小型無人直升機實際飛行過程進行全面的建模。而其中對小型無人直升機系統的數學模型建模又是重中之重。這里主要利用MIT以及Aalborg大學研究人員提出的兩套無人直升機的建模方法,結合各自的優點,充分考慮無人直升機在不同模態切換之間的模型差異,對無人直升機進行數學建模,并轉換成可以實施的仿真系統模型。仿真系統主要包括直升機數學模型模塊、飛行控制系統模塊、數據融合模塊、控制輸入模塊,人機圖形界面模塊以及數據通信模塊等。其中直升機數學模型模塊主要包括:直升機非線性模型、直升機線性化模型、陣風擾動模型、地形模型、傳感器模型以及伺服驅動器模型。直升機非線性模型主要包括主旋翼、伺服小翼、尾旋翼、空氣動力學模型以及6自由度剛體動力學模型。直升機線性化模塊主要是在直升機非線性模型的基礎上根據控制需要進行適當的簡化,以便用來對線性控制器的性能進行檢驗。陣風擾動模型主要用來對小型無人直升機在實際飛行環境中的陣風進行模擬。地形模型主要考慮直升機在起飛和降落過程中與地面之間的相互作用。這當中涉及到地面與槳葉間的渦流效應,對其建模非常復雜,故這里暫時不考慮。傳感器模型主要包括GPS定位模型、IMu測量模型和聲納測距模型。伺服驅動模型主要模擬將伺服板接收到的輸入信號轉換為伺服電機的轉動并最終轉換成機械動作后直接作用于旋翼的過程。飛行控制系統模塊指利用設計的控制算法對直升機進行自主飛行控制。數據融合模塊主要指利用卡爾曼濾波算法對各個傳感器測量到的數據進行融合計算。控制輸入模塊主要用于直升機自主飛行時對其飛行狀態進行調校。人機圖形界面能生動實時地再現直升機的仿真效果。經過以上分析,可以得到小型無人直升機仿真系統的結構圖如圖2所示。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 建立模型直升機的動力學方程 1次下載
- 無人直升機機載飛控軟件的系統開發 14次下載
- 小型無人直升機高度測量模塊設計_趙松濤 1次下載
- 小型無人直升機點對點數據鏈系統設計_朱威 5次下載
- 基于ARM小型直升機飛控系統設計與實現 34次下載
- 無人直升機飛行控制系統的設計與實現 31次下載
- 小型直升機圖紙 2次下載
- 基于神經網絡的艦載無人直升機著艦控制研究
- 基于ARM的小型無人直升機飛行控制系統設計
- 微小型無人駕駛直升機建模與仿真分析
- 小型無人直升機的數學建模與仿真
- 基于預測誤差法小型無人直升機系統辨識
- 某型武裝直升機模擬器空地導彈仿真研究
- 基于VxWorks的無人直升機控制系統設計
- 小型直升機LINUX 仿真系統構建
- AC-AC-MMC實時仿真應用指南 405次閱讀
- 壓電疊堆功率放大器在直升機機身振動研究中的應用 1013次閱讀
- 微型超智能射頻誘餌Nano SPEAR不到800克 863次閱讀
- Linux是實時系統還是分時操作系統? 1572次閱讀
- 基于STM32單片機的四旋翼無人機飛控設計 5153次閱讀
- 基于仿真平臺GL Studio實現虛擬儀表DLL的設計 4982次閱讀
- 應用于直升機自動導航系統的信號適配器設計方案 1286次閱讀
- 關于四種實時嵌入式Linux操作系統的對比分析淺析 6336次閱讀
- 關于嵌入式系統的特點和Linux內核的實時應用分析 1141次閱讀
- 以Linux 2.6為基礎的提高Linux實時性的方法探討 1594次閱讀
- 一文匯總無人機基本知識 1.4w次閱讀
- 基于linux系統實現的vivado調用VCS仿真教程 1.1w次閱讀
- 為什么選擇Linux操作系統?制約標準Linux操作系統實時性的因素 5488次閱讀
- 基于PWM的無人機精準變量噴灑系統方案設計 4430次閱讀
- 單旋翼無人機與遙控直升機有區別嗎? 4954次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統的設計與實現
- 0.61 MB | 2次下載 | 免費
- 6基于FPGA的C8051F單片機開發板設計
- 0.70 MB | 2次下載 | 免費
- 751單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21548次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論