 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
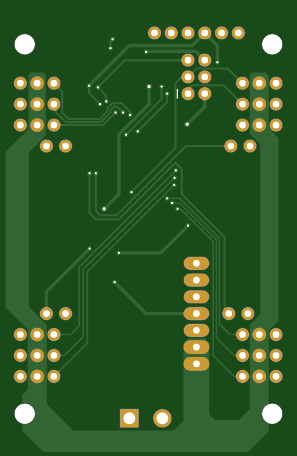
電路板圖如下: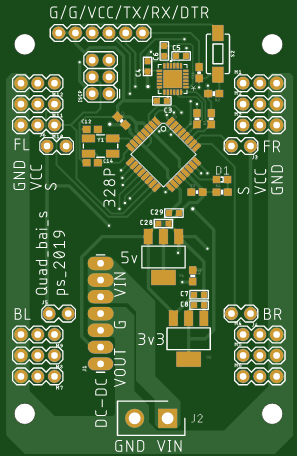
成分
|
ATMEGA328P-PU 微芯片技術/愛特梅爾 |
× 1 |
|
TPS61088RHLR TI(德州儀器) |
× 1 |
|
MPU-6050 TDK InvenSense |
× 1 |
描述
四足白伺服
關于
Github
由愛好伺服驅動的低成本 12DOF 四足動物。請注意,這是 2019 年開發的早期版本。如果您正在尋找高性能桌面 Quad,請查看正在進行的 [Quadruped bai tiny](https://github.com/psrobotics/Quadruped_bai_tiny)
硬件
所需部件如下所列。對于所有打印部件,推薦的打印填充量為 70%。根據您的打印機類型設置正確的打印方向和支持。
| 零件名稱 | 數量 | 鏈接 | 信息 |
| -------------------------------------------------- --------- | -------- | -------------------------------------------------- ---------- | ------------------- |
| 腿尖 | 2 | [STL 文件](硬件/stl) | 印刷部分 |
| leg_tip_MIR | 2 | / | / |
| 腿_2 | 2 | / | / |
| leg_2_MIR | 2 | / | / |
| leg_link_1 | 2 | / | / |
| leg_link_1_MIR | 2 | / | / |
| leg_link-1 | 2 | / | / |
| leg_link-1_MIR | 2 | / | / |
| 腿_1 | 2 | / | / |
| leg_1_MIR | 2 | / | / |
| 腿_1_2 | 2 | / | / |
| leg_1_2_MIR | 2 | / | / |
| 伺服支架_1 | 2 | / | / |
| 伺服支架_1_MIR | 2 | / | / |
| hip_joint_holder_1 | 2 | / | / |
| hip_joint_holder_1_MIR | 2 | / | / |
| hip_holder_2 | 2 | / | / |
| hip_holder_2_MIR | 2 | / | / |
| 聯合持股人 | 2 | / | / |
| 身體橋 | 2 | / | / |
| body_frame_2 | 1 | / | / |
| body_frame_1 | 1 | / | / |
| pcb_holder | 2 | / | / |
| M3*8 | ?20 | / | 螺絲 |
| M3*12 | ?30 | / | / |
| M3*16 | ?20 | / | / |
| M2*8 | ~50 | / | / |
| M2*15 | ~50 | / | / |
| M2*20 | ?20 | / | / |
| M2*26 | ?20 | / | / |
| SF-1 0305 自潤滑復合軸承襯套 | ?25 | [易趣]()| 用于旋轉接頭 |
| EMAX ES08A II 伺服 | 12 | [ EMAX ]() | 執行器 |
打印零件后,將軸承插入旋轉接頭周圍的所有 5mm 孔中。然后用 M3 螺絲固定零件。記得檢查旋轉摩擦,確保所有關節在安裝舵機的情況下可以自由旋轉。
伺服選擇
致動器的性能對于腿式機器人至關重要。即使我們正在建造一個小型的。這種設計的理想執行器應該是高度可反向驅動的,具有高功率密度,并且是扭矩可控的。然而,大多數現成的伺服系統與這些功能無關。有一些高壓無刷伺服系統(帶有用于反饋的磁性編碼器)具有相對較好的性能,但在這種尺寸下它們非常昂貴。如果你有足夠的預算,為什么不建造一個無刷的呢?考慮到您需要 12 個伺服器進行組裝,我的建議只是選擇預算。EMAX ES08A(金屬齒輪版)適用于我的構建。尼龍齒輪版本也是可以接受的,但它們在沖擊下很容易損壞。
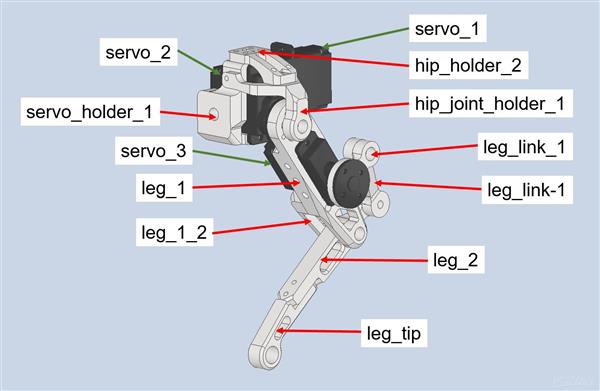
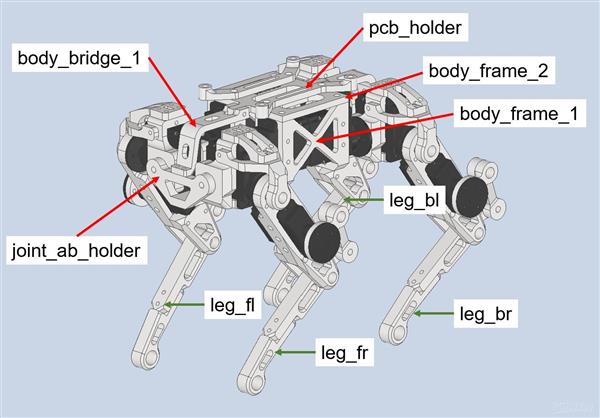
車身總成
該機器人由 4 條腿和一個身體框架組成。先組裝 2 條腿。
組裝另外 2 條鏡腿。然后將所有腿連接到身體框架。
腳傳感器(可選)
額外的腳傳感器可以檢測腳是否接觸地面。這在將狀態機從“搖擺狀態”更改為“站立狀態”時會很有幫助。Quadruped bai 伺服的腳是可切換的。如果您決定添加腳傳感器,則需要對固件進行一些額外的配置(稍后會詳細說明)。
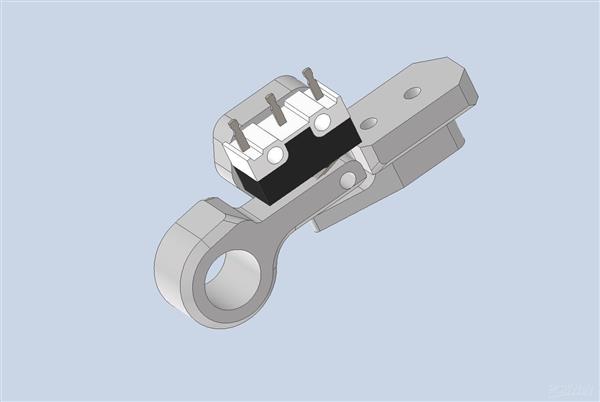
腳傳感器圍繞微型開關構建,可檢測來自特定方向的沖擊。至于結果,這個設計并沒有那么好。一個好的腳傳感器解決方案應該能夠檢測來自各個方向的沖擊,具有低延遲和清晰的輸出。[Open Dynamic Robot Initiative]提出了一個帶有紅外傳感器的優雅解決方案。以此作為參考,正在進行的 Quadruped bai tiny 將配備更好的腳傳感器。如圖所示組裝腳傳感器。(記得打印右側腿的鏡像部分)
組裝腳傳感器只需要 3 個打印部件,請在此處查看 [STL 文件](hardware/stl/feet_sensor)。
為了增加腳與地面之間的摩擦力,額外的高摩擦涂層至關重要。我在腳尖上使用了一些膠合硅膠片。您還可以設計腳尖并用高摩擦材料打印。
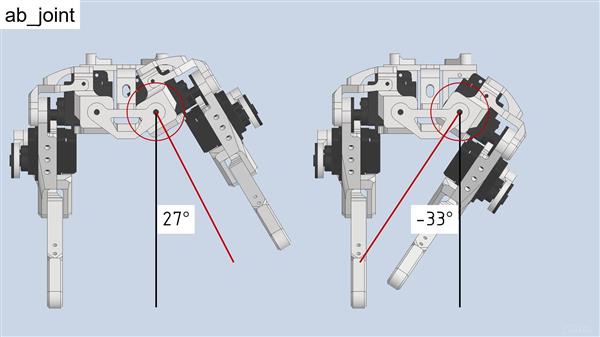
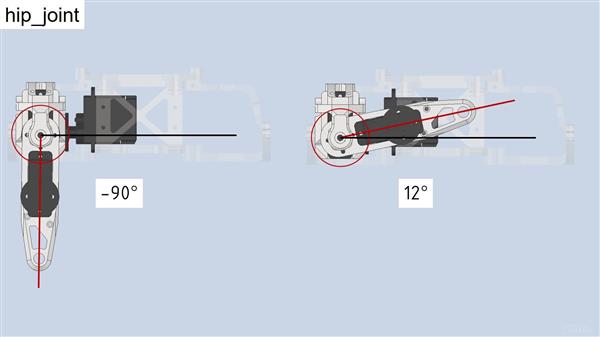
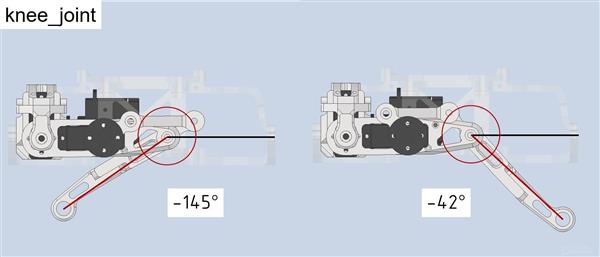
伺服校準
大多數舵機的運動范圍都是有限的,請確保舵機的運動范圍涵蓋下圖所示的腿連桿關節極限。此外,在此步驟中通過在安裝前向伺服系統應用初始 PWM 信號(例如 0°)進行預校準。這使所有伺服系統都具有相同的 PWM 關節角度映射。然后,您可以在固件中對其進行微調。
電子的
控制器板組件包括伺服控制器、IMU 和 DC-DC 轉換器模塊。通過額外的串行端口,您可以將機器人連接到啟用無線控制的無線或藍牙模塊。圍繞 ATmega328P 構建,微控制器的性能,IO 不足以滿足此類應用。我鼓勵您將此原理圖作為參考并切換到高性能 32 位微控制器(例如 STM32H7、ESP32)。如果您更喜歡 AVR Arduino 板,請直接使用此設計,它會起作用。
導出的 Gerber 文件也會上傳。如果您不想訂購 PCB,也可以使用現成的組件(Arduino nano、MPU 6050、dc-dc 轉換器等)來制作。
控制器板引腳分配
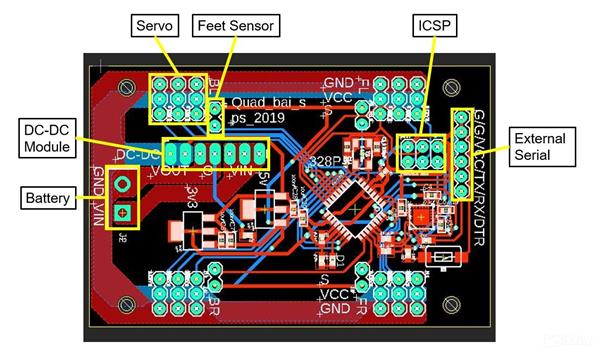
使用 ICSP 上傳固件并使用外部串口進行調試。硬件IIC引腳(A4,A5)被IMU占用(MPU6050也是一個'老芯片',你可以用BNO080之類的東西代替)。
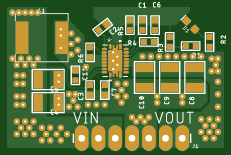
DC-DC轉換器
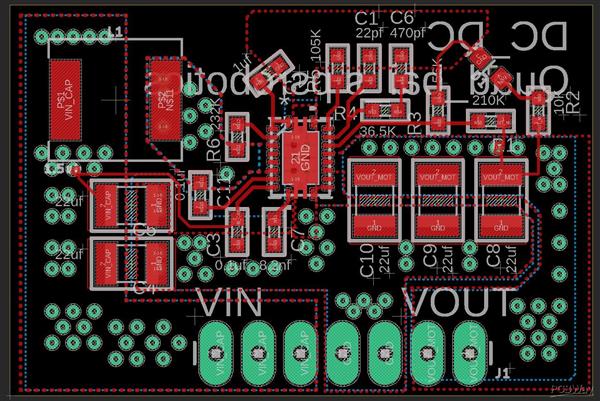
集成升壓轉換器為伺服系統供電。預配置的輸出電壓為 5.5V,您可以通過 [替換]() 反饋電阻進行更改。將此模塊插入控制器板上的 DC-DC 插槽。
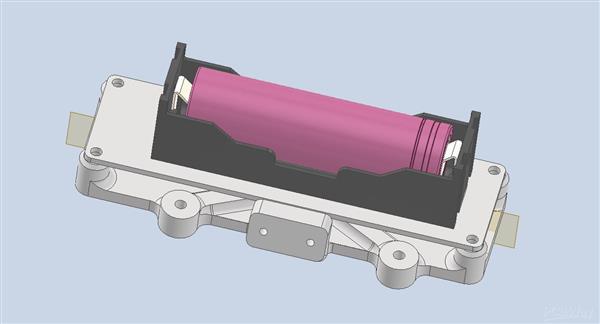
電池
優先選擇具有大電流輸出能力(>10A)的單節鋰電池。本項目使用18650、18350電池。[電池架](硬件/步驟)可以打印并安裝在機器人框架下。
模擬
固件
實現了一個簡化的控制器來生成行走的小跑模式。在這里,我應用了一個狀態機來輕松同步一組開放的腳軌跡(帶有腳傳感器)。IMU 單元用于在站立階段調整身體側傾和俯仰。請注意,此機器人僅在運動學層面上進行控制,不要指望它在行走過程中抵抗外部沖擊。
本項目不提供任何保證,構建風險自負。
代碼
STL、PCB 和固件
https://github.com/psrobotics/Quadruped_bai_servo
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 开源低成本电力监控系统0次下载
- Robobug六足动物行走和跟随障碍物开源硬件0次下载
- 低成本机器人消毒系统开源分享0次下载
- 低成本无线火箭发射器开源分享0次下载
- 迈尔斯开源四足蜘蛛机器人3次下载
- ESP32低成本板开源项目3次下载
- 一种低成本、低功耗的WiFi618120次下载
- 仿生液压四足机器人伺服控制器设计资料下载17次下载
- LCD的显示原理及低成本驱动方法资料下载9次下载
- 低成本高性能的新一代高压功率MOSFET33次下载
- 高性能低成本的蓝牙模块CSR6576原理图17次下载
- 低成本的医疗检测与监测方案8次下载
- 基于ADAMS的四足仿生机器人单腿结构设计3次下载
- 开关电源设计12秘籍高效低成本的解决方案5次下载
- 低成本LCD驱动控制的ASIC实现方案56次下载
- AD8137低成本、低功耗差分ADC驱动器技术手册155次阅读
- 如何提高伺服驱动器的效率843次阅读
- 伺服驱动器和伺服控制系统的区别1302次阅读
- 伺服驱动器控制电源和主电源的区别2716次阅读
- 伺服驱动器和伺服电机的区别3594次阅读
- 伺服放大器和伺服驱动器的区别2641次阅读
- 伺服驱动器和伺服控制器的区别2916次阅读
- 伺服电机驱动器设置参数教程8587次阅读
- 伺服驱动器的常见故障和处理方法4808次阅读
- 什么是伺服驱动器?伺服驱动器的工作原理和应用领域7296次阅读
- 伺服驱动器的工作原理_伺服驱动器内部结构53644次阅读
- 伺服驱动器如何接线_伺服驱动器接线图115289次阅读
- 伺服驱动器故障代码55139次阅读
- 伺服驱动器怎样维修_伺服驱动器维修技巧20668次阅读
- 伺服驱动器的工作模式与伺服驱动器的测试方法13080次阅读

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1第十一屆 藍橋杯 單片機設計與開發項目 省賽 程序設計試題及源碼
- 90.88KB | 23次下載 | 3 積分
- 2輕松解碼串口通信
- 509.30 KB | 3次下載 | 免費
- 3STM32F103C8T6開發板最小系統原理圖
- 0.78 MB | 1次下載 | 免費
- 4LT8822SS共漏N溝道增強型場效應晶體管規格書
- 1.22 MB | 1次下載 | 免費
- 5ACDC茂睿芯MK2687寬供電范圍高效率反激 PWM 控制器
- 2.28 MB | 1次下載 | 免費
- 6LTS3002FJI N溝道增強型功率MOSFET規格書
- 1.30 MB | 次下載 | 免費
- 7ESD保護器件ESD0504TL規格書
- 2.97 MB | 次下載 | 免費
- 8ESD保護器件GBLCxxCI系列規格書
- 2.85 MB | 次下載 | 免費
本月
- 1STM32開發板教程之STM32開發指南免費下載
- 24.88 MB | 177次下載 | 3 積分
- 2EN60335-1安規標準 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 3DeepSeek從入門到精通
- 5.07 MB | 38次下載 | 免費
- 4第十一屆 藍橋杯 單片機設計與開發項目 省賽 程序設計試題及源碼
- 90.88KB | 23次下載 | 3 積分
- 5NR-E531TX-XN冰箱說明書
- 8.64 MB | 19次下載 | 免費
- 6STM32單片機無人機設計
- 8.81 MB | 10次下載 | 免費
- 7華為硬件工程師手冊目前最全版本
- 1.02 MB | 8次下載 | 2 積分
- 8MAX9295電路圖
- 0.14 MB | 6次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935126次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191377次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81584次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論