 電子發燒友App
電子發燒友App













 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
嗨,朋友們,你們好嗎-:) 希望你們一切都好,今天我帶來了一個很酷的新項目
今天我將使用NodeMCU ESP8266(12e)制作無人機,我們使用esp8266作為飛行控制器
飛控板
這是從地面控制無人機的最重要的事情之一。市場上有許多飛行控制板。其中有些是開源的,有些不是。以下列表包含最著名和最受好評的飛行控制器:
- KK 2.0 (亞馬遜)
- DJI A3(亞馬遜)
- LUX 飛行控制器(Amazon.com )
- DJI Nava M(亞馬遜)
- 3DR Pixhawk(亞馬遜網站)
- 矢量 ( Amazon.com )
- ArduPilot(亞馬遜網站)
- 親吻(亞馬遜網站)
- Naze32(亞馬遜網站)
- CC3D (亞馬遜)
謝謝 NextPCB
本項目的順利完成,得益于 NextPCB 的幫助和支持。伙計們,如果您有 PCB 項目,請訪問他們的網站并獲得令人興奮的折扣和優惠券。
第 1 步:組件
Esp8266 12e(亞馬遜)
Mpu6050(亞馬遜)
無人機套件(Amazon.com )
第 2 步:什么是 ESP8266?

基本上,ESP8266 是一個 Wi-Fi 模塊。它具有 2.4 GHz Wi-Fi 的能力,即 802.11 b/g/n。它支持 WPA 和 WPA2。
它是一個集成了 32 位處理器的片上系統,運行頻率為 80 MHz(也可以超頻至 160 MHz)。它有 64 KB 的 RAM 和 64 KB 的引導 ROM。
ESP8266 的數據 RAM 為 96 KB。它便宜、小巧、功能強大。這就是為什么每個人都將它用于不同類型的項目。
您幾乎可以在任何需要使物聯網無線化和智能化的地方使用 ESP8266。
第 3 步:無線電發射器和接收器?

發射器所做的就是向接收器發送信號。接收器接收到這個信號并根據來自發射器的命令進行操作。由于無人機漂浮在天空中,它需要發送信號來命令無人機移動或做某事。
無線電控制器通常由發射器和接收器組成,它們通常在不需要低功率發射器許可的無線電頻率上運行
較舊的發射器/接收器組合使用 MHz 頻段中的頻率,例如用于模型飛機的 72MHz 頻段和用于地面車輛的 75MHz 頻段。
這些頻段中的每一個都被劃分為單獨的頻道,您需要找到一個未使用的頻道來操作您的飛機或車輛。如今,在 2.4GHz 頻段中使用“擴頻”無線電更為常見。擴頻技術的使用消除了選擇頻道的需要。
因此,如果飛行員從發射器向無人機發出命令,無人機通過接收器接收到它,飛行控制器會根據飛行員的命令處理信號并執行操作。
頻道
不要與舊設備中使用的單個射頻頻道相混淆,在本文中,“頻道”是指控制頻道。這些渠道中的每一個都與兩件事相關:
- RC 控制器上的開關、操縱桿、電位計或顯示器。
- 接收器上的輸出或輸入。
發射模式
在描述 RC 發射器時,您會看到這個術語。術語“模式”通常適用于在飛機上使用發射器,它指的是發射器如何配置以控制飛機,即在飛機上哪個搖桿操作哪個控制。
標準發射器有兩個搖桿,每個搖桿都可以水平和垂直移動。因此,每根搖桿都有兩個通道,一個用于水平運動,另一個用于垂直運動。
共有四種 TX 模式:
- 模式 1 – 左搖桿操作升降舵和方向舵,右搖桿操作油門和副翼。
- 模式 2 - 左搖桿操作油門和方向舵,右搖桿操作升降舵和副翼。
- 模式 3 - 左搖桿操作升降舵和副翼,右搖桿操作油門和方向舵。
- 模式 4 – 左搖桿操作油門和副翼,右搖桿操作升降舵和方向舵。
接收者
Flysky FS-I6X 附帶的接收器是一個 6 通道單元,即 FS-IA6B。該設備有兩個小線天線、七個用于輸入/輸出設備的 3 針連接器,以及兩個用于 iBUS 發送和接收連接的附加 3 針連接器。(Flysky 提供了一個可用于完成此操作的跳線。)
第 4 步:偏航、俯仰、滾動
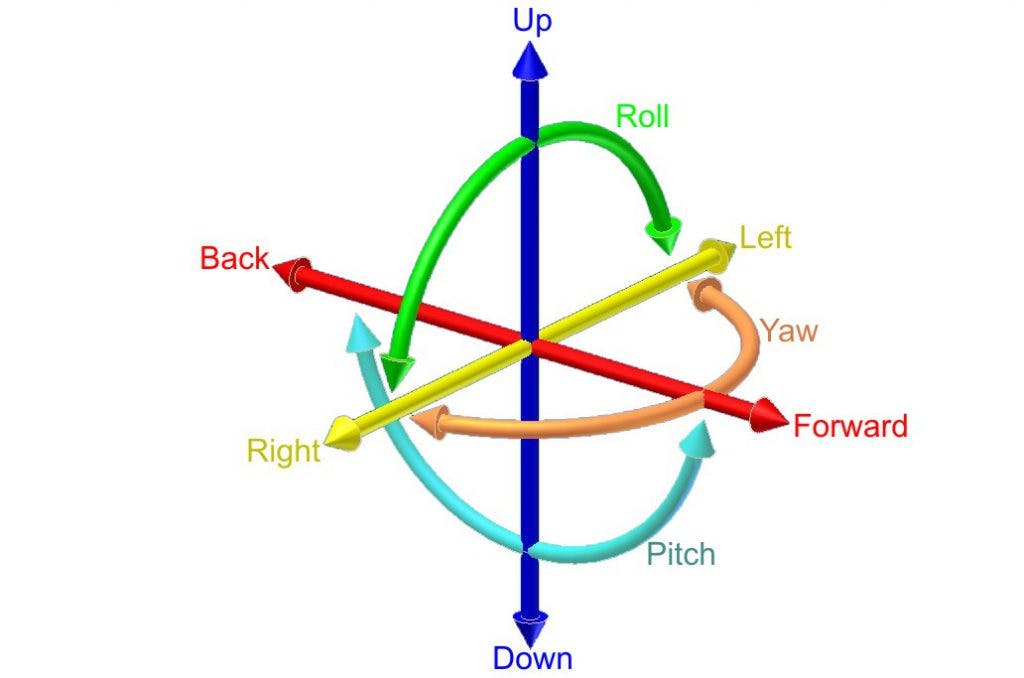
偏航
Yaw 是無人機在 xy 平面上的運動,也就是如上圖所示的水平面。相反的一對螺旋槳會產生反作用力。如果每個螺旋槳的所有運動的總和彼此相等,則沒有偏航運動。但是如果任意一對螺旋槳有不同的運動,就會有偏航運動,無人機就會運動,如下圖所示:
如果無人機只是沿 z 方向旋轉,則稱為偏航運動。如果有穩定的向上力并且螺旋槳力如下:
下面是螺旋槳的運動......
瀝青
這會在側軸上移動四軸飛行器,因此它會從前到后上下傾斜。通過這樣做,它會導致車輛根據傾斜的方式向前或向后移動。
一個很好的類比是在使用“是”手勢時上下點頭。
卷
這會在長(縱向)軸上移動 Quadcopter,因此它會左右傾斜。
第 5 步:電池、車架、電機、螺旋槳和電調
沒有電池,無人機毫無用處。所有電機、飛行控制器、無線電和處理都需要電源。
但使用笨重的電池來駕駛無人機并不是一個明智的決定,因為大部分能量將花費在無人機飛行的推力上。所以,我們需要選擇輕便但功能強大的電池。
在無人機中,我們通常使用鋰聚合物電池。
為無人機選擇合適的電池是最關鍵的事情之一。在為您的無人機選擇電池之前,請記住以下事項:
- 電池尺寸和重量
- 電池放電率
- 電池容量
- 電池電壓
- 電池連接器
您可以借助以下公式輕松計算電池的連續電流輸出。如果當前...
您如何為您的無人機或四軸飛行器選擇合適的 LIPO?
只有在您知道要購買哪種無人機,或者您知道要為您的四軸飛行器使用哪種電機、電子速度控制器 (ESC) 和螺旋槳時,才能為您的無人機或四軸飛行器選擇合適的 LiPo。
以下是為您的四軸飛行器選擇正確 LiPo 的指南:
? 3 英寸四軸飛行器:450 – 850mAh
? 4 英寸四軸飛行器:850 – 1300mAh
? 5 英寸四軸飛行器:1300 – 1800mAh
? 6 英寸四軸飛行器:1500 – 2200mAh
? 7 英寸四軸飛行器:1800 – 3200mAh
無人機框架
基本上,無人機框架是構建無人機最重要的。它有助于在其上安裝電機、電池和其他部件。
無人機電機
有幾種類型的電機可用于制造無人機。但是由于無人機需要在空中推力才能漂浮,我們應該使用一些強大的電機。無人機中使用的廉價、輕便、小巧且功能強大的電機是無刷直流電機 (BLDC)。對于小型無人機,我們不使用 BLDC 電機,而是使用小型 DC 齒輪電機。
螺旋槳
當您為無人機選擇螺旋槳時,請選擇最輕但最強的螺旋槳。您還需要記住,螺旋槳應在兩側保持平衡。
大多數無人機飛行失敗是由于螺旋槳故障。所以要慎重選擇。始終選擇合適尺寸的螺旋槳。按照電機手冊選擇最適合的尺寸。下圖顯示了不同類型的螺旋槳:
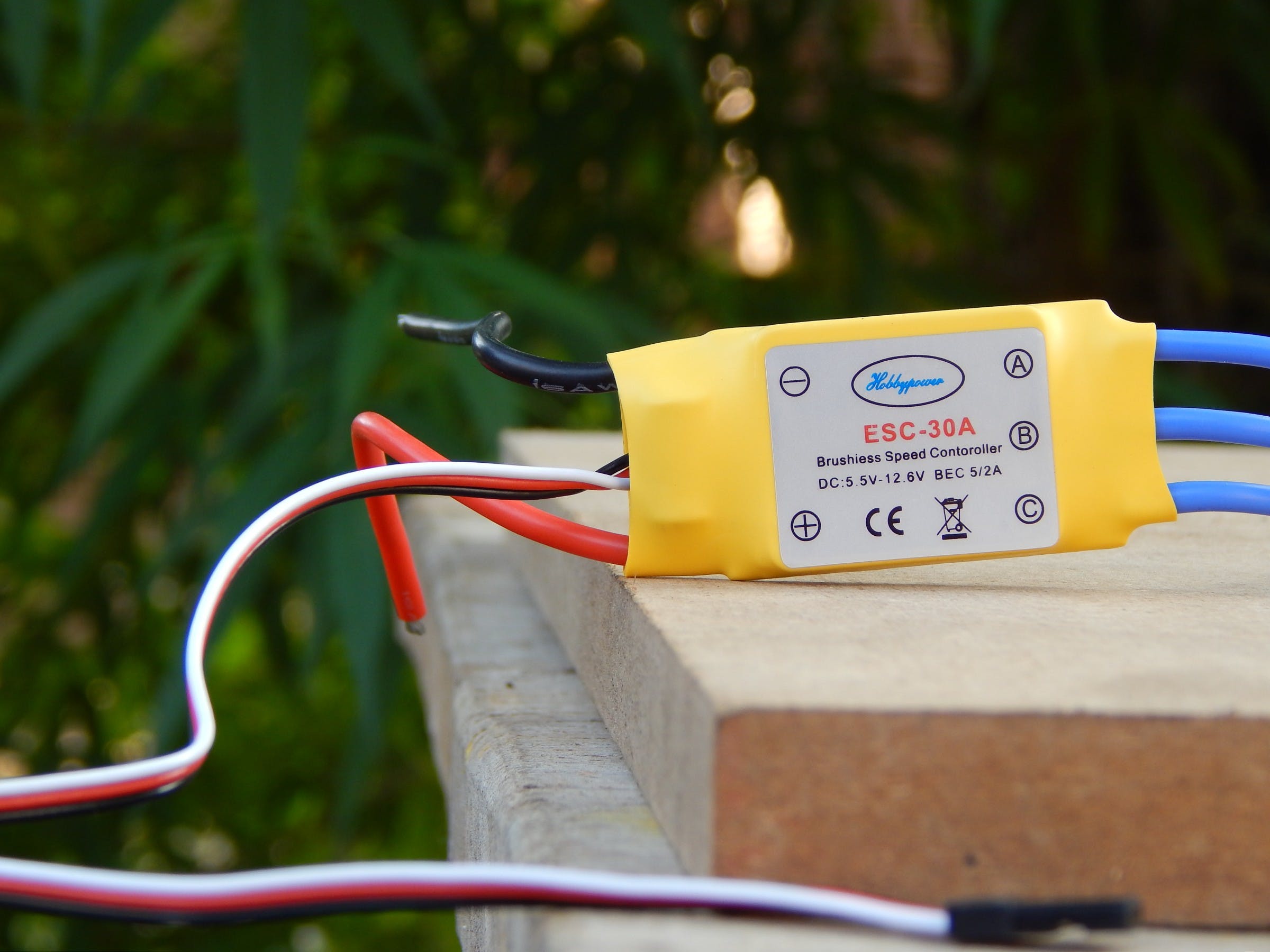
ESC鍵
除非您使用速度控制器,否則您無法控制無人機電機的速度。它們使您能夠控制電機的電壓和電流,從而控制速度,這是在空中漂浮后將無人機從一個地方移動到另一個地方的首要任務。您需要增加和減少電機的速度才能使無人機向前、向后、向左或向右移動。
一些使無人機更智能的模塊
還有其他模塊可以使無人機更加智能,例如 GPS、Wi-Fi 模塊(例如 ESP8266)、電池檢查器和增程器天線等。
第 7 步:組裝
我們將開始組裝和飛行我們的無人機。好吧,將提供完整的零件清單,以便您可以購買適當數量的設備。所以讓我們從第 2 章開始,組裝你的無人機。
在你建造無人機之前要知道的事情,我們被介紹了無人機的所有基本組件。在本章中,我們將組裝我們的無人機并為下一階段做好準備。
我們將涵蓋以下主題
組裝你的無人機在你建造無人機之前要知道的事情,我們被介紹了無人機的所有基本組件。
在本章中,我們將組裝我們的無人機并為下一階段做好準備。
我們將涵蓋以下主題。
- 組裝框架
- 連接電機
- 連接電調
- 連接 ArduPilot
- 使用 ArduPilot 配置無人機
- 飛行無人機所需的空氣動力學
- 了解飛行無人機的安全協議
- 防止無人機墜毀
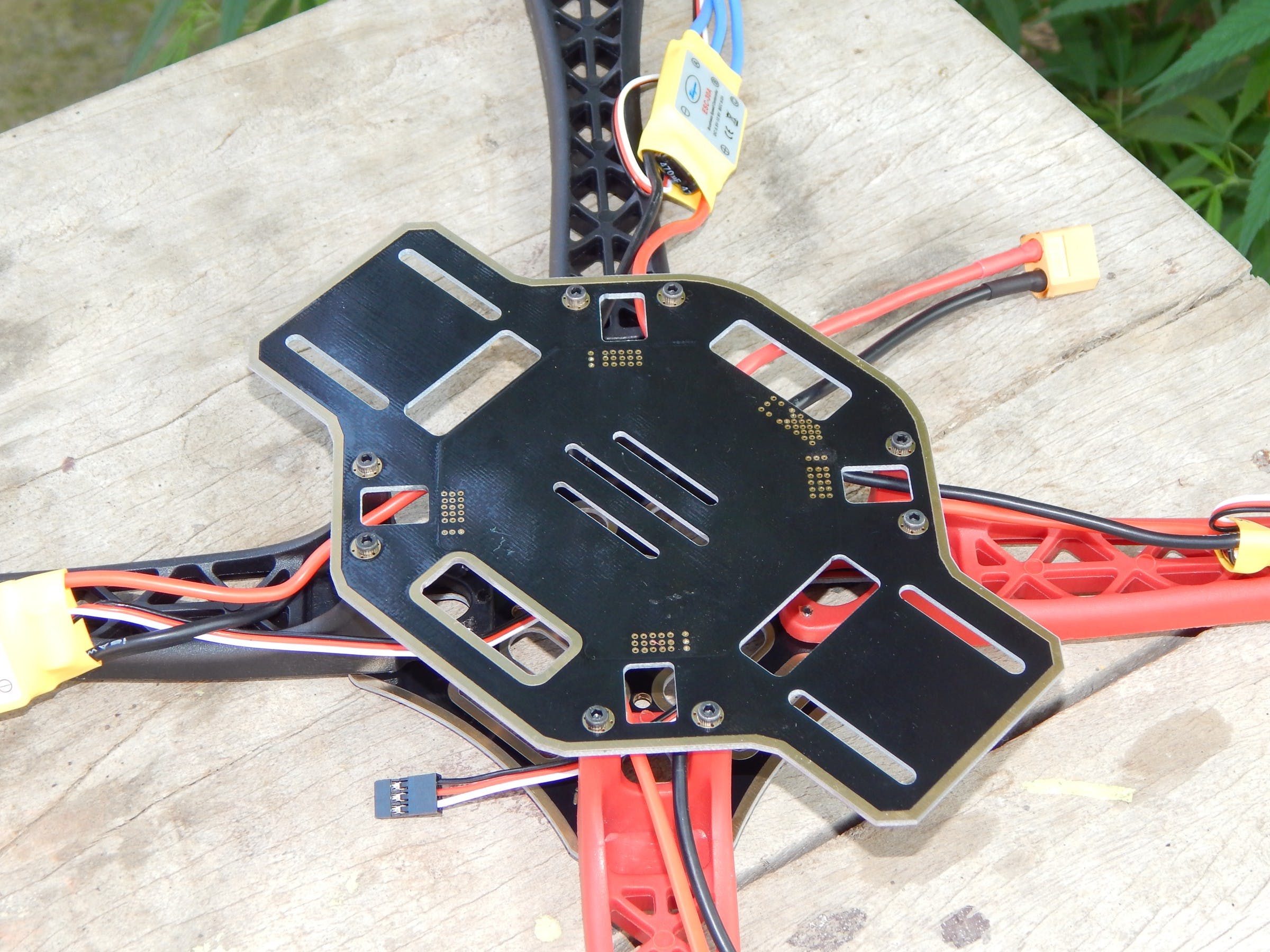
組裝框架
無人機框架的組裝需要很大的耐心,再次建議您在第一次進行時遵循使用說明書
連接電機要連接電機,您需要將電機放在框架臂上并安裝螺絲,如下圖所示,確保在不破壞框架臂的情況下盡可能擰緊螺絲: BLDC有三根電線從電機出來。我們需要將子彈連接器焊接到它們以連接到 ESC。現在,將其他三個電機連接到框架臂。
連接 ESC連接 ESC 是構建無人機或任何其他無人機的最重要任務之一。您可以購買四片電調或四合一電調。建議你用四合一電調,比較輕,好用。如果您使用單個電調,請將電機的線連接到電調,如下圖所示。電機和ESC的連接無關緊要,因為電線僅用于改變相位:
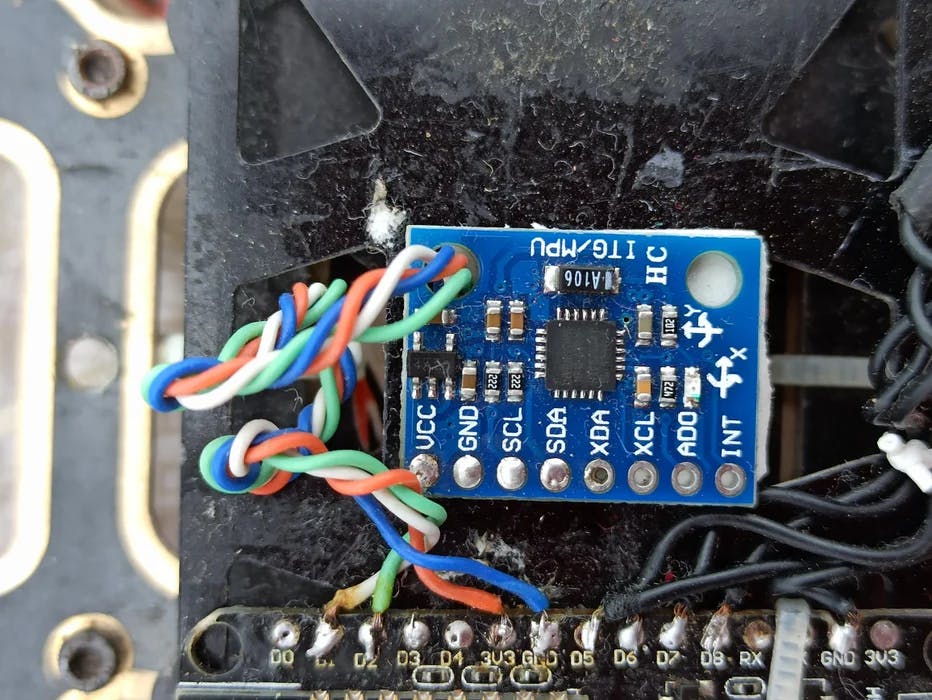
第 8 步:MPU6050
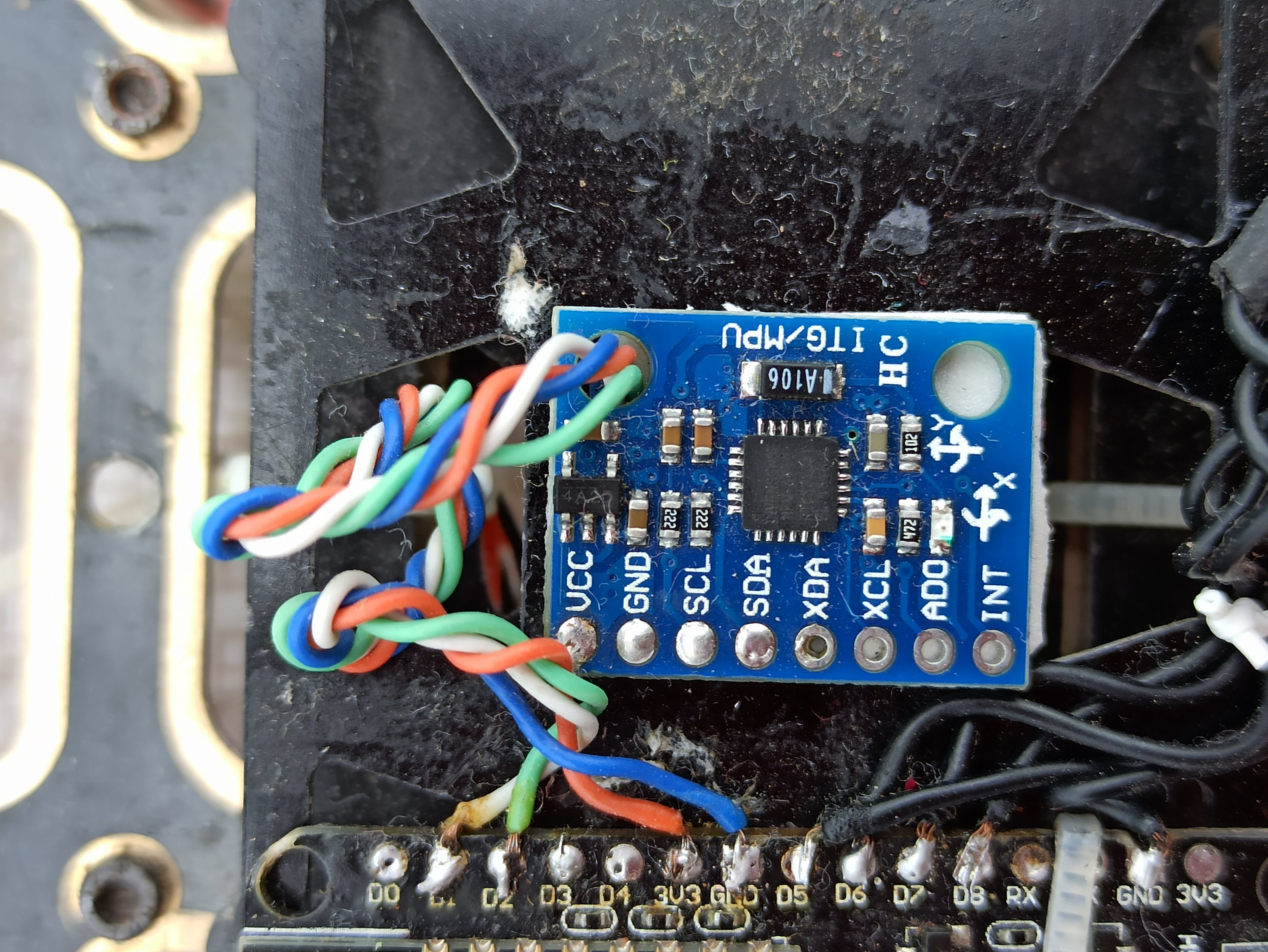
該傳感器使用 i2c 進行通信。所以我將 SDA 和 SCL 連接到 NodeMCU 的 D1 和 D2。如數據表中所述,每個傳感器都有 3 種模式。
我將使用陀螺儀的 500 度刻度范圍和加速度計的 8g 刻度范圍。為了從中獲得角度,我必須配置這些寄存器。
arduino IDE 的 Wire 庫可以輕松完成這項工作。然后它從傳感器請求 14 個字節并連續讀取角度。
確保您已將整數定義為 16 位,因為數據是 2 的補碼值。加速度計提供實時角度但陀螺儀提供角速度。
如果我想從陀螺儀獲得角度,那么我必須整合每個循環中的角速度。因此,我從 2 個不同的傳感器獲得了角度。
嗯,電機會產生很多振動,這會顯著影響加速度計。所以我使用了一個免費的過濾器來克服這個問題。
它使用兩個傳感器數據來生成穩定的角度。
但是陀螺儀傳感器幾乎沒有錯誤。為了解決這個問題,我放置了無人機水平儀并讀取了 4000 次數據,然后取平均值,我得到了陀螺儀錯誤。這樣我就可以校準一次,每次都使用。
然后我在每個循環中減去它。所以,現在我得到了完美的實時角度。
第 9 步:接線圖和代碼
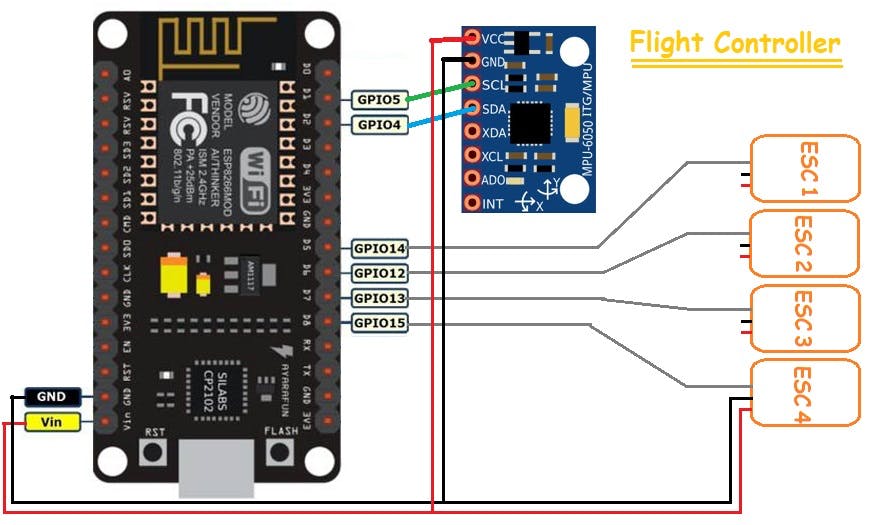
接線圖非常簡單。
您必須按照原理圖將 MPU6050 模塊引腳與 Esp8266 引腳連接起來。示意圖如上所示。
并用電腦上傳代碼
第 10 步:制作電路
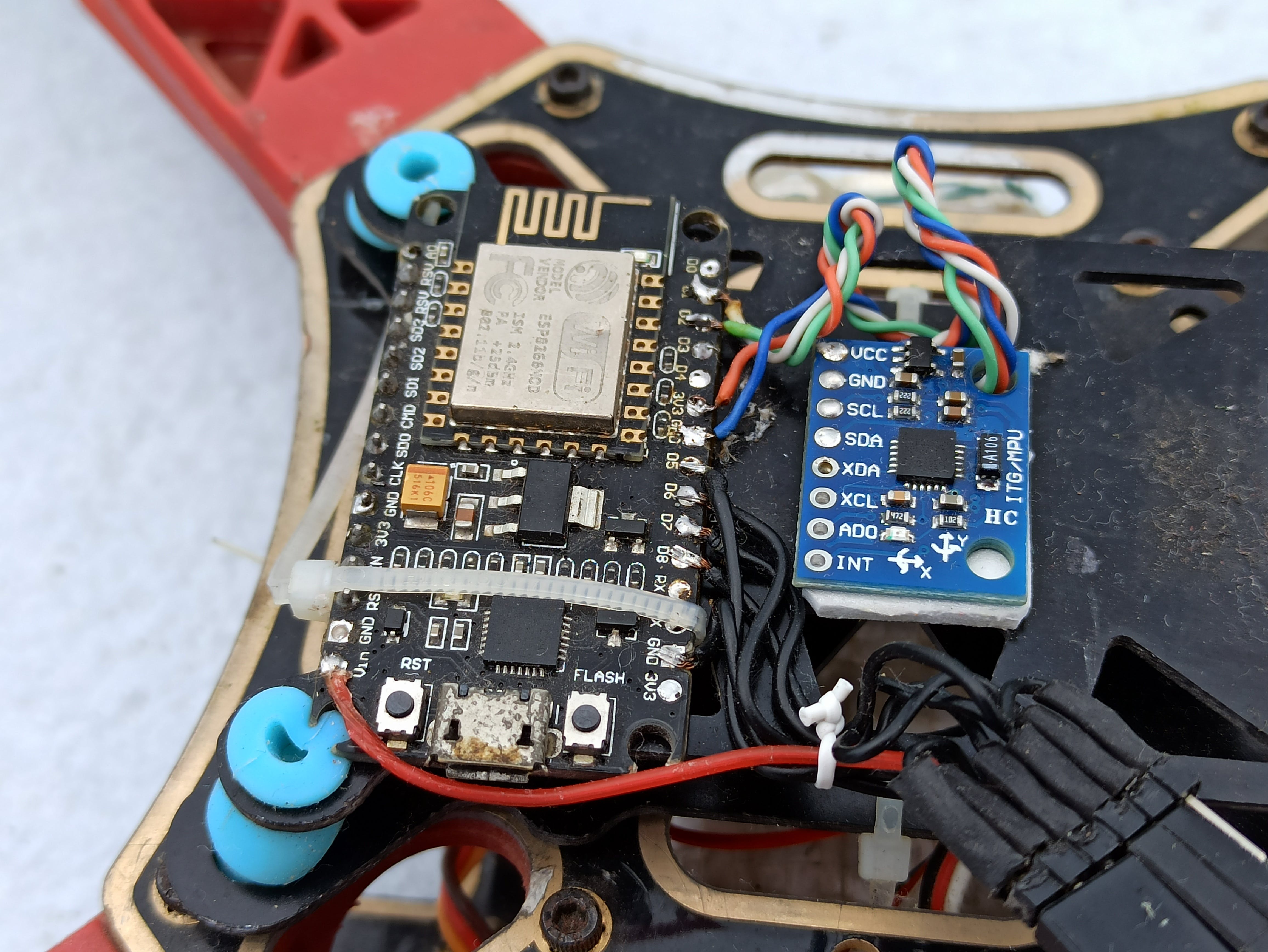
按照上圖給出的示意圖制作電路。
我已經解釋了模塊的連接細節。
第 11 步:飛行前檢查
飛行前檢查東西
- 檢查所有連接
- 檢查發送器和接收器綁定
- 檢查電池電量和電壓
- 檢查所有螺旋槳是否連接牢固
- 檢查所有電機安裝
- 檢查所有螺絲
- 檢查無人機的平衡,看是否有一側比另一側重
- 飛行后務必拔掉電池;只在飛行前幾秒鐘裝上電池
- 檢查外面的任何障礙物
- 讓兒童遠離飛行區域
- 首次油門時與無人機保持距離
- 打開自動駕駛儀并返回主頁/啟動功能(如果可用)
- 不要在不平衡的情況下駕駛無人機...
第 12 步:飛行前檢查
在天空中飛行的國家/地區政府有一些規定,特別是無人機。始終檢查安全協議。一些常見的規則如下:
- 您不能在機場 5 英里范圍內駕駛無人機
- 您必須將無人機保持在您的視線范圍內
- 您不得高于 400 英尺(約 0.12 公里)
- 您不能在繁忙的交通區域駕駛無人機
- 如果您將無人機用于商業目的或專業用途,則必須注冊您的無人機;你必須有執照
- 在駕駛無人機之前始終了解當地規則
第 13 步:讓您的無人機免于墜毀

你幾乎無法阻止你的無人機撞壞一些螺旋槳,甚至是機身。損壞將取決于墜機和墜落的高度。它還取決于您的無人機降落或墜毀的表面。
駕駛無人機的最佳地點是沒有樹木或任何電線懸掛的開闊場地。一開始不要用大油門抬起無人機,逐漸加大油門。稍后我們將了解安全節流。現在,您可以先使用穩定模式。請記住,油門只不過是加快無人機螺旋槳的速度。如果您是初學者,我的建議是學習如何將無人機懸浮在地面上。一旦您...
第 14 步:飛行:
那么,讓我們看看它是如何飛行的。
這是一個非常簡單的飛行控制器。我將在即將發布的視頻中升級它。喜歡 - 添加 GPS。指南針、自動駕駛儀、alt 保持等等。而談到這個...
我使用的是 WiFi 而不是發射器,所以,是的,它可以提供無限的范圍。別擔心,我會制作一個關于 Tx 通信的專用視頻。
感謝您的支持,我們很快就會在下一個視頻中見到您,然后再見。
?
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 飞行控制器原理图0次下载
- 构建基于ESP8266的物联网控制器3次下载
- 使用ESP32的无人机飞行控制器14次下载
- ESP8266单股RGB LED控制器板2次下载
- esp8266 12f无人机开源分享25次下载
- 使用ESP8266-01制作WIFI遥控小车(一)46次下载
- 个性化制作nodemcu-firmware(esp8266 硬件制作)----程序bin的制作11次下载
- ESP8266 控制开关29次下载
- 中移合物固件ESP8266软件下载8次下载
- 一种小型复合式无人机飞行控制布局方案25次下载
- 无人机的飞行原理的简介和设计资料说明17次下载
- 无人机和无人机控制方法及无人机远程操控系统方法说明70次下载
- 无人机环绕目标飞行控制2次下载
- 基于STM32微控制器的小型无人机飞行控制系统37次下载
- 基于ARM的无人机飞行控制系统的实现194次下载
- ESP8266红外信号收发实验2181次阅读
- ESP8266硬件5121次阅读
- 无人机实现稳定飞行需要用到哪些传感器呢2561次阅读
- ESP8266/ESP32自动下载原理5144次阅读
- 基于ESP8266微控制器的WiFi百叶窗开启器2176次阅读
- 如何使用ESP8266制作可配置的Web服务器13640次阅读
- 如何利用ESP8266制作一个简单的四轴飞行器5428次阅读
- 如何使用ESP8266开发板制作光强度检测器4497次阅读
- 无人机飞行感知技术有什么用途2206次阅读
- 关于如何制作一个无人机37914次阅读
- 浅析基于FPGA的无人机控制器设计方案解析7251次阅读
- esp8266中文资料汇总(esp8266引脚图_与单片机连接_串口wifi实例)226760次阅读
- 怎样使无人机安全飞行?无人机飞行需要掌握什么安全知识16540次阅读
- 远程控制通讯--基于Arduino + ESP8266控制LED灯40324次阅读
- esp8266 at指令集详解145058次阅读
 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論