 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
你想用你的思想來(lái)控制事物嗎?這個(gè)教程描述了如何使用腦電波駕駛遙控卡車。耳機(jī)感應(yīng)到我的腦電波并將它們傳輸?shù)揭慌_(tái)小型計(jì)算機(jī)。當(dāng)我提高注意力或眨眼時(shí),計(jì)算機(jī)會(huì)轉(zhuǎn)換信號(hào)并將它們傳遞給卡車的遙控器,我已將其連接到計(jì)算機(jī)。當(dāng)我集中注意力時(shí),車輪會(huì)旋轉(zhuǎn)。0ne 強(qiáng)烈的眨眼左轉(zhuǎn)。強(qiáng)烈的雙眨眼會(huì)右轉(zhuǎn)。
耳機(jī)是NeuroSky MindWave Mobile 2,電腦是Arduino Uno微控制器,藍(lán)牙模塊是HC-05。
實(shí)際應(yīng)用
一些開(kāi)發(fā)人員已經(jīng)應(yīng)用這些想法來(lái)幫助癱瘓的人;例如,駕駛輪椅、家庭自動(dòng)化或在屏幕上選擇字母和單詞以便在屏幕上或通過(guò)語(yǔ)音進(jìn)行交流。他們的項(xiàng)目可以在 YouTube 上找到。
項(xiàng)目的主要步驟
這個(gè)項(xiàng)目有5個(gè)主要步驟:
- 將 HC-05 連接到 Arduino,對(duì)其進(jìn)行配置,并將其與 MindWave 配對(duì)。
- 將舵機(jī)連接到遙控器。
- 給 Arduino 接線。
- Arduino 草圖(代碼)。
- 上傳 Arduino 草圖并使用它。
控制機(jī)器人車輛的方法
在開(kāi)始我的項(xiàng)目之前,我在 Internet 上搜索了 NeuroSky 項(xiàng)目,以了解開(kāi)發(fā)人員選擇使用哪些腦電波信號(hào)。許多項(xiàng)目只使用了注意力和冥想級(jí)別,還有一些項(xiàng)目還使用了眨眼。在我的項(xiàng)目中,我決定使用注意力級(jí)別來(lái)控制向前和停止行駛,單閃左轉(zhuǎn)或雙閃右轉(zhuǎn)。
有一個(gè)項(xiàng)目采用了非常不同的方法:當(dāng)用戶眨眼時(shí),軟件開(kāi)始循環(huán)向前、向后、向左、向右,每個(gè)循環(huán) 2 秒。如果用戶眨了兩下眼,那么車輛就會(huì)在那個(gè)瞬間朝自行車所在的任何方向行駛。這種方法提供了很大的靈活性,但可能會(huì)很慢。例如,如果用戶右轉(zhuǎn),他們將無(wú)法左轉(zhuǎn)大約 6 秒,
將 NeuroSky MindWave Mobile 2 連接到 Arduino 的方法
一些開(kāi)發(fā)人員通過(guò)藍(lán)牙將他們的 NeuroSky MindWave Mobile 直接連接到 Arduino 板,這是我決定做的。這種方法比下一種方法更容易(如下所述),但檢測(cè)到眨眼需要更長(zhǎng)的時(shí)間(略超過(guò) 1 秒)。這對(duì)我的項(xiàng)目來(lái)說(shuō)沒(méi)問(wèn)題。
其他開(kāi)發(fā)人員通過(guò)計(jì)算機(jī)或智能手機(jī)對(duì)信號(hào)進(jìn)行實(shí)時(shí)預(yù)處理,然后將數(shù)據(jù)發(fā)送到 Arduino。這允許進(jìn)行更復(fù)雜的分析或處理,并且可以更快地檢測(cè)到眨眼(大約半秒)。NeuroSky 在這個(gè)網(wǎng)站上有關(guān)于這種方法的教程,適用于 PC Windows、Apple Mac OSX、Android 和 IOS:我決定不使用這種方法,因?yàn)樗枰獙W(xué)習(xí)如何在計(jì)算機(jī)或智能手機(jī)上對(duì)軟件進(jìn)行編程。
最大化注意力水平
最大化注意力水平的方法因人而異。以下是一些建議:
- 專注于一個(gè)對(duì)象。
- 仔細(xì)閱讀食品容器上的成分清單。
- 記住食品容器上的一些營(yíng)養(yǎng)成分。
- 從 100 倒數(shù)到 6 或 7。
- 在頭腦中進(jìn)行算術(shù)運(yùn)算。
- 聽(tīng)一首說(shuō)唱歌曲并嘗試?yán)斫飧柙~。
- 用你不流利的語(yǔ)言閱讀一些東西。
眨眼
眨眼需要很強(qiáng)才能被檢測(cè)到。正常的眨眼被忽略。
頭部應(yīng)保持靜止,以避免錯(cuò)誤的眨眼檢測(cè)。在這個(gè)項(xiàng)目中檢測(cè)眨眼的方法包括檢查從耳機(jī)接收到的信號(hào)的質(zhì)量。強(qiáng)烈的眨眼會(huì)使前額的皮膚移動(dòng),從而降低信號(hào)的質(zhì)量,這被解釋為眨眼。如果頭部移動(dòng),耳機(jī)的傳感器可能會(huì)輕微移動(dòng),從而降低信號(hào)質(zhì)量,這將被識(shí)別為眨眼。
這種檢測(cè)眨眼的方法不使用大腦的神經(jīng)信號(hào)。我的理解是 NeuroSky 的計(jì)算機(jī)/智能手機(jī)方法可以。
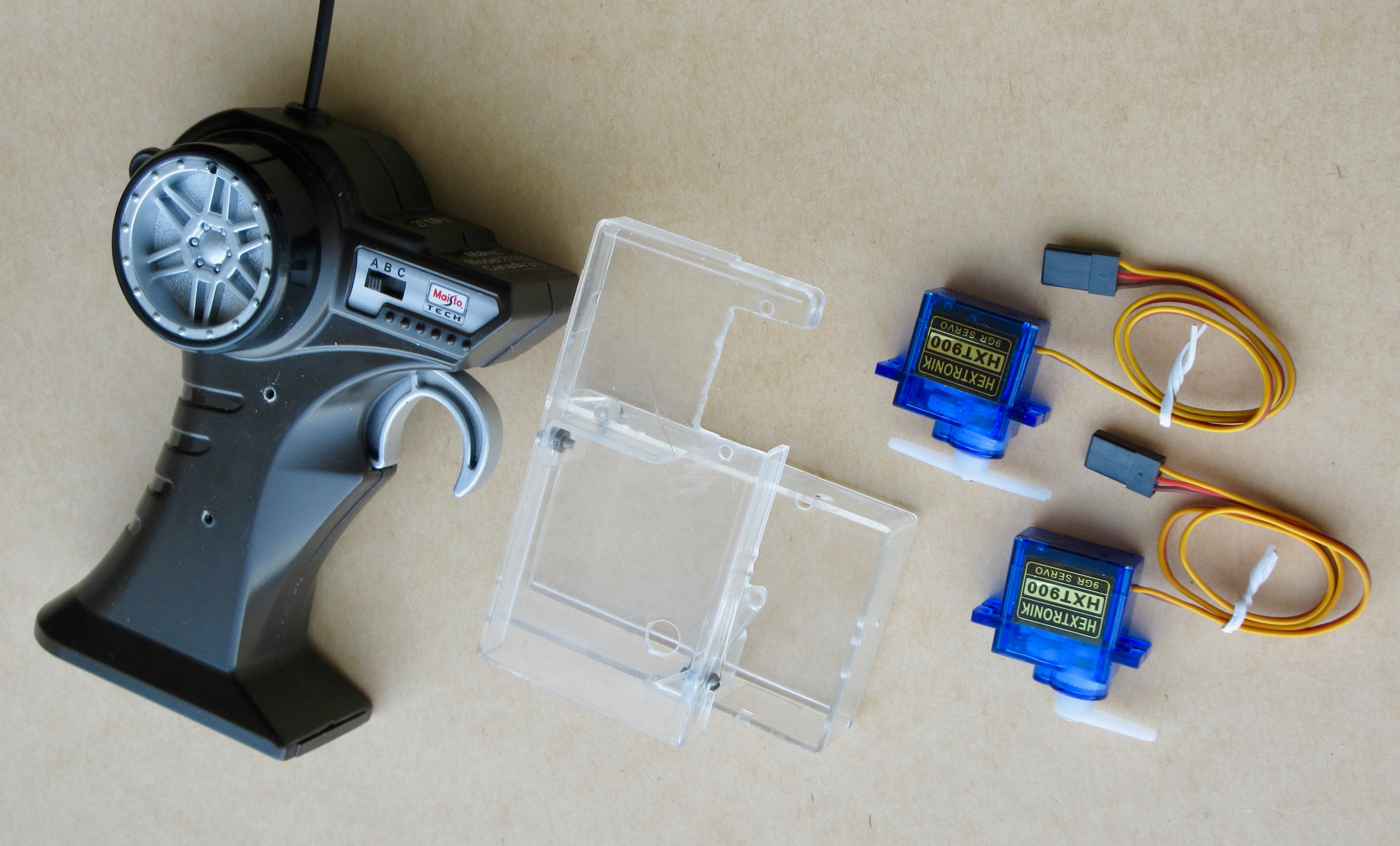
電子零件
- NeuroSky MindWave Mobile 2 耳機(jī)和 1 節(jié) AAA 電池
- 一臺(tái)電腦(我用的是 Apple iMac)
- Arduino Uno 或其他型號(hào)及其 USB 數(shù)據(jù)線
- HC-05藍(lán)牙模塊
- 兩個(gè)伺服電機(jī)(我使用 Solarbotics HXT900 Micro Servos)
- 面包板和面包板電線
- 綠色、黃色和紅色 LED
- 3 x 330 歐姆電阻
- 2 x 1K 歐姆電阻
- 2 個(gè) 2K 歐姆電阻
- 電源,約 5 伏,如支架中的 3 節(jié) AA 電池
伺服連接到遙控器的零件
- 小塑料或紙板箱,或其他方式將伺服系統(tǒng)固定到位
- 膠水或螺母和螺栓將盒子的各個(gè)部分連接在一起
- 將其連接到遙控器的某種方式。(我用了 2 個(gè)螺絲。)
- 用于連接伺服系統(tǒng)的小螺母和螺栓。(我使用了一些實(shí)心線和 2-56 號(hào)螺栓,并且不得不稍微擴(kuò)大伺服中的螺栓孔。)
第 1 步:將 HC-05 連接到 Arduino,配置并配對(duì)
有關(guān)詳細(xì)信息,請(qǐng)查看我之前的一個(gè)項(xiàng)目中的步驟 1 和 2:
第 2 步:將伺服器連接到遙控器
有兩種方法可以將 Arduino 連接到卡車的遙控器:
遙控器可能被黑客攻擊如下:移除或繞過(guò)由控件推動(dòng)的開(kāi)關(guān),然后將 Arduino 連接到控制器的電路板并對(duì) Arduino 進(jìn)行編程以在適當(dāng)?shù)碾娋€上施加電壓。我的遙控器中的開(kāi)關(guān)非常小,以至于我認(rèn)為嘗試將新電線焊接到電路板上的適當(dāng)位置太棘手了。如果我犯了一個(gè)小錯(cuò)誤,董事會(huì)可能會(huì)被毀掉。
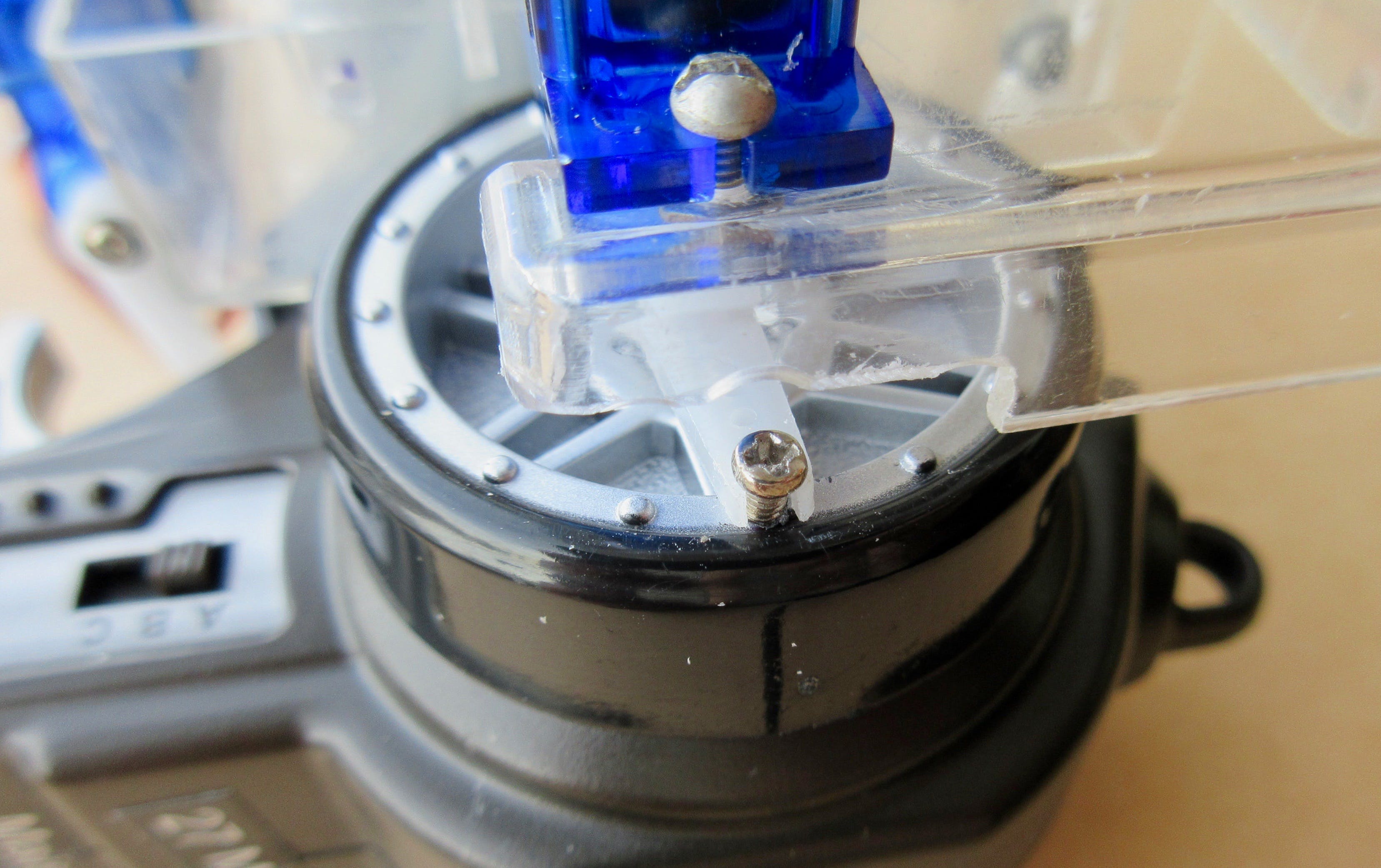
我使用伺服系統(tǒng)來(lái)移動(dòng)控件。將伺服系統(tǒng)連接到遙控器上被證明是一個(gè)“有趣”的挑戰(zhàn),但現(xiàn)在一切正常。
幸運(yùn)的是,經(jīng)過(guò)一些切割和裝配后,有一個(gè)大小合適的小塑料盒可以將伺服系統(tǒng)連接到卡車的遙控器上。尺寸為 2-56 的螺母和螺栓將盒子的各個(gè)部分固定在一起。兩個(gè)螺絲將盒子固定在遙控器上。
?
左/右控制的伺服臂末端有一個(gè)小凹口,給它一些擺動(dòng)空間。伺服臂的中心不太可能與控制中心完全對(duì)齊。固定該臂末端的螺釘需要稍微松動(dòng)。
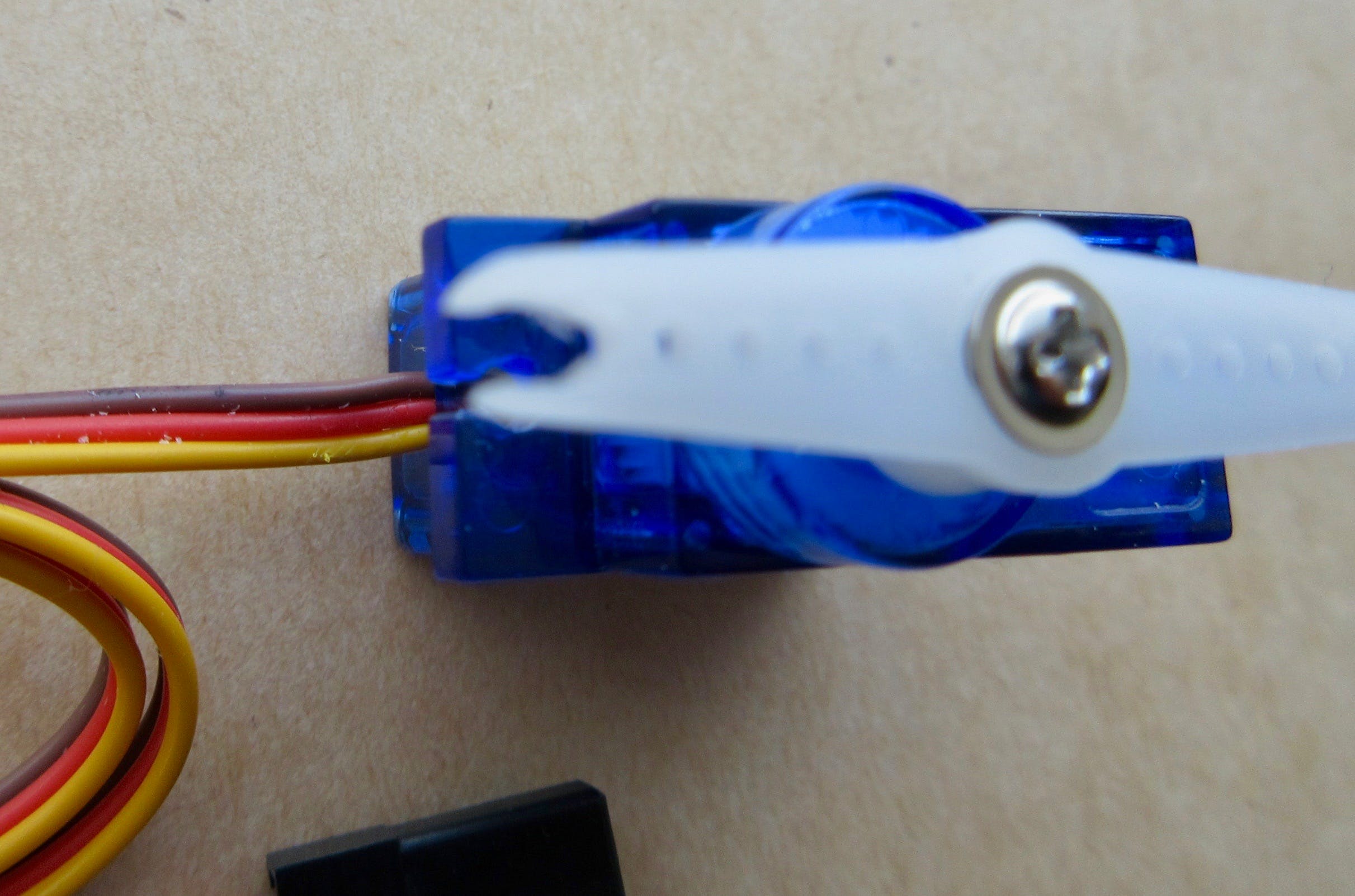
?
為了連接左/右舵機(jī),我使用了 2-56 尺寸的螺母和螺栓,并且不得不稍微擴(kuò)大舵機(jī)上的螺栓孔。實(shí)心線將 Go/Stop 伺服固定到位。
?
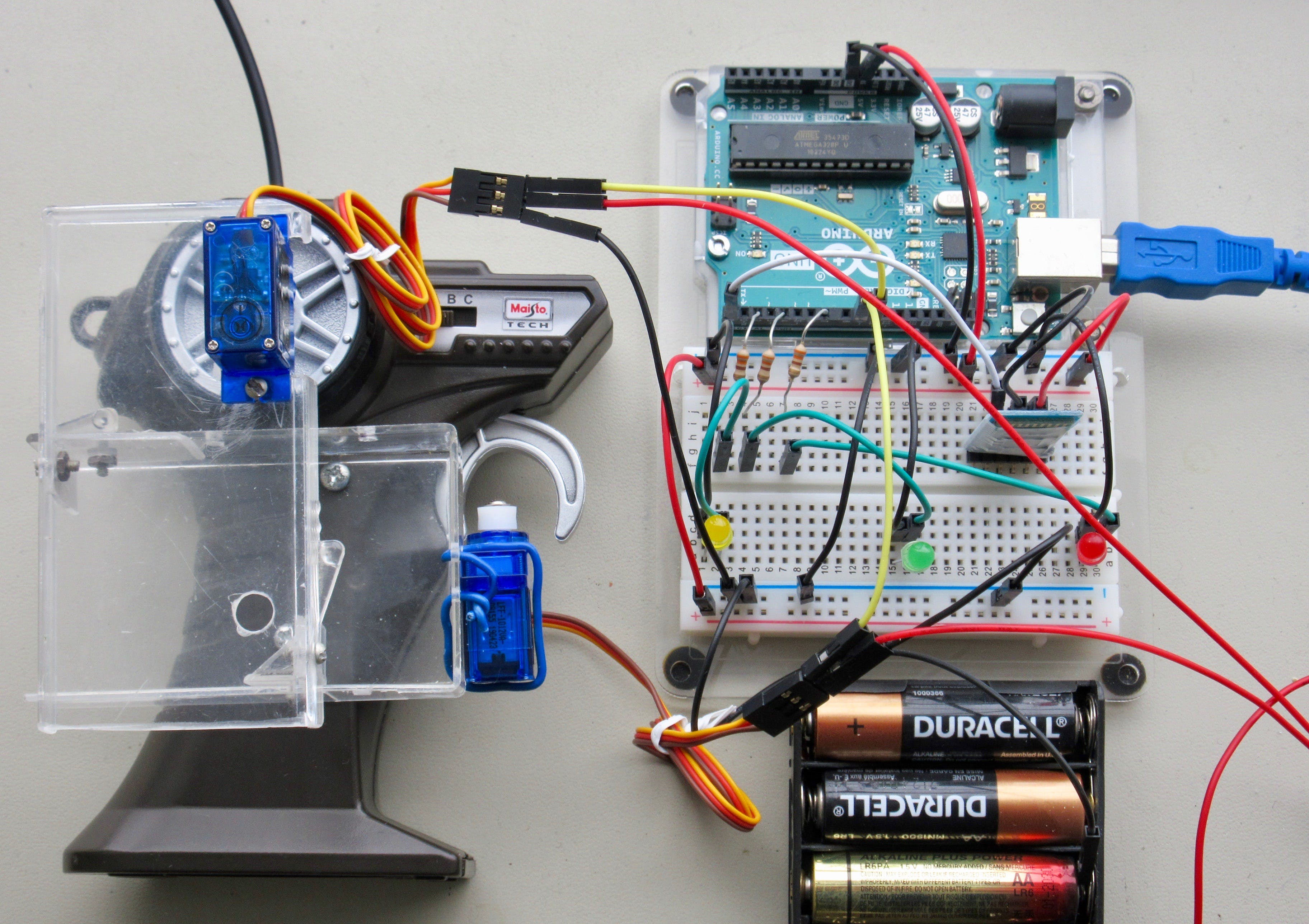
第 3 步:連接 Arduino
電路如圖所示,描述如下:
- Arduino 的 +5V 連接到面包板上的 +
- Arduino 的 GND 連接到 - 在面包板上
- 330 歐姆電阻從引腳 2 到黃色 LED 的長(zhǎng)線和另一根 LED 線到 - 在面包板上
- 330 歐姆電阻從引腳 4 到綠色 LED 的長(zhǎng)線和另一根 LED 線到 - 面包板上
- 330 歐姆電阻從引腳 7 到紅色 LED 的長(zhǎng)線和另一根 LED 線到 - 在面包板上
- 引腳 9 連接到 Go/Stop 伺服的信號(hào)線。是那個(gè)黃色的。
- 引腳 10 連接到左/右舵機(jī)的信號(hào)線。
- - 伺服系統(tǒng)的橙色線連接到單獨(dú)的 4.5 伏電源的正極。
- - 伺服系統(tǒng)的棕色電線連接到 - 面包板上。
- - 單獨(dú)電源的負(fù)號(hào)轉(zhuǎn)到 - 在面包板上。
- HC-05 TXD 連接到 Arduino 的 RX(引腳 0)
- HC-05 + 轉(zhuǎn)到面包板上的 +
- HC-05 GND 連接到 - 在面包板上
?
第 4 步:Arduino 草圖(代碼)
該代碼具有以下主要功能:
- 從 MindWave 耳機(jī)讀取數(shù)據(jù)。
- 當(dāng)注意力超過(guò) 70 時(shí)打開(kāi)綠色 LED 并移動(dòng) Go/Stop 伺服臂以推動(dòng) Go/Stop 觸發(fā)器。
- 當(dāng)注意力小于 70 時(shí)關(guān)閉綠色 LED 并將 Go/Stop 伺服臂移回其中點(diǎn)。
- 檢測(cè)到閃爍時(shí)打開(kāi)黃色 LED,并將閃爍信號(hào)設(shè)置為 1。
- 1.2 秒后檢查第二次閃爍。
- 如果是單次閃爍,將左/右伺服臂向“左”移動(dòng) 2 秒鐘,然后將其轉(zhuǎn)回,并關(guān)閉黃色 LED。
- 如果是雙閃,打開(kāi)紅色 LED,關(guān)閉黃色 LED,將左/右伺服臂“向右”移動(dòng) 2 秒鐘,然后將其轉(zhuǎn)回,然后關(guān)閉紅色 LED。
- 在每個(gè)主要步驟中,在計(jì)算機(jī)上的串行監(jiān)視器中顯示數(shù)據(jù)。
Arduino 草圖(代碼)可以從該項(xiàng)目中包含的.ino 文件中下載,或者可以將以下代碼復(fù)制并粘貼到新的 Arduino 草圖中。(在編寫這些指令時(shí),instructables 系統(tǒng)有時(shí)會(huì)刪除位于代碼開(kāi)頭的部分#include 語(yǔ)句。第一個(gè)應(yīng)該是#include 后跟左箭頭 < 后跟 Servo.h 后跟右箭頭 > 和第二個(gè)應(yīng)該是#include,后跟左箭頭<,然后是Mindwave.h,然后是右箭頭>)。
草圖使用一個(gè)特殊的庫(kù),必須在運(yùn)行草圖之前安裝。
這個(gè)項(xiàng)目可以不使用庫(kù)來(lái)完成,但是代碼會(huì)更復(fù)雜。從耳機(jī)讀取數(shù)據(jù)、提取注意力級(jí)別和檢查信號(hào)質(zhì)量的代碼在本網(wǎng)站包含的示例代碼中:
草圖應(yīng)該可以成功編譯,但可能會(huì)顯示 MindWave.cpp 庫(kù)的警告消息。這可能會(huì)被忽略。
//
// 草圖使用大腦的注意力水平進(jìn)行 Go/Stop 和
// 轉(zhuǎn)彎時(shí)眨眼。
//
// 硬件:Arduino Uno、HC-05 藍(lán)牙、NeuroSky MindWave Mobile 2。
// 高度關(guān)注 = 綠色 LED 亮(開(kāi)始);低 Att = 綠色 LED 熄滅(停止)。
//第一次閃爍&左轉(zhuǎn)=黃色LED;雙閃 = 紅色 LED(右)。
// 左右轉(zhuǎn)為 2 秒。
// 信息顯示在串行監(jiān)視器上。
//
#include
#include
思維波思維波;
#define YLED 2 // 定義 LED 引腳
#define GLED 4
#定義 RLED 7
伺服myservoG;// 開(kāi)始/停止伺服
伺服myservoLR;//左/右舵機(jī)
int gosignal = 0; // 走或停指標(biāo)
int 閃爍信號(hào) = 0; // 第一次閃爍后的信號(hào)計(jì)數(shù)器
int 閃爍 = 0; // 一組閃爍次數(shù)
長(zhǎng)時(shí)間未簽名;// 經(jīng)過(guò)時(shí)間的變量
無(wú)符號(hào)長(zhǎng)時(shí)間0;// 第一次閃爍時(shí)間的變量
無(wú)符號(hào)長(zhǎng)時(shí)間1;// 從第一次閃爍到第二次閃爍的時(shí)間變量
無(wú)效設(shè)置(){
Serial.begin(MINDWAVE_BAUDRATE);
pinMode(13,輸出);// 將 LED 引腳初始化為輸出
pinMode(GLED,輸出);
pinMode(YLED,輸出);
pinMode(RLED,輸出);
myservoG.attach(9); // 將 Go/Stop 伺服連接到引腳 9
myservoG.write(90); // 將舵機(jī)移動(dòng)到中點(diǎn)
myservoLR.attach(10); // 將左/右伺服器連接到引腳 10
myservoLR.write(90); // 將舵機(jī)移動(dòng)到中點(diǎn)
延遲(15);// 給伺服時(shí)間移動(dòng)到那里
}
無(wú)效 onMindwaveData() {
if (mindwave.quality() < 90) { // 如果質(zhì)量差,板載 LED 亮起
數(shù)字寫入(13,高);
} 別的 {
數(shù)字寫入(13,低);
}
// 檢查注意力等級(jí)
if ((mindwave.attention() > 70) && (gosignal == 0)) {
Serial.print("Go, ");
Serial.print("\注意:");
Serial.print(mindwave.attention());
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
序列號(hào).println();
數(shù)字寫入(GLED,高);// 綠色 LED 亮
信號(hào) = 1; // 表示去
myservoG.write(130); // 機(jī)器人前進(jìn)的伺服
延遲(4000);// 在檢查前等待 4 秒
// 如果注意力下降
}
if ((mindwave.attention() < 70) && (gosignal == 1)) {
Serial.print("停止, ");
Serial.print("\注意:");
Serial.print(mindwave.attention());
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
序列號(hào).println();
數(shù)字寫入(GLED,低);// 綠色 LED 熄滅
信號(hào) = 0; // 表示停止前進(jìn)
myservoG.write(90); // 機(jī)器人停止伺服
延遲(15);
}
// 第一次閃爍
if ((mindwave.quality() < 95) && (blinksignal == 0)) {
Serial.print("第一次閃爍");
Serial.print("\tquality:");
Serial.print(mindwave.quality());
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(閃爍信號(hào));
序列號(hào).println();
time0 = 毫秒();
眨眼 = 1;
閃爍信號(hào) = 1;// 第一次閃爍
數(shù)字寫入(YLED,高);// 黃色 LED 亮
}
// 閃爍后立即顯示質(zhì)量,并增加計(jì)數(shù)器
// 來(lái)自耳機(jī)的信號(hào)
if ((blinksignal > 0) && (blinksignal < 4)) {
Serial.print("\tquality:");
Serial.print(mindwave.quality());
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(閃爍信號(hào));
序列號(hào).println();
如果(閃爍信號(hào)> 0){
閃爍信號(hào) = 1 + 閃爍信號(hào);// 增加信號(hào)計(jì)數(shù)器
}
time1 = millis() - time0;
}
// 雙閃?
if ((mindwave.quality()<95) && (time1 > 1200)){
Serial.print("\tquality:");
Serial.print(mindwave.quality());
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(閃爍信號(hào));
Serial.print("\ttime1:");
序列號(hào).print(time1);
Serial.print("\tblinks now = 2");
序列號(hào).println();
眨眼 = 2;
}
// 單閃左轉(zhuǎn)
if ((blinks == 1) && (blinksignal > 3)) {
Serial.print("左, ");
Serial.print("\t單閃");
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(閃爍信號(hào));
序列號(hào).println();
閃爍信號(hào) = 0; // 為下一次閃爍重置
// 機(jī)器人左轉(zhuǎn)輪子 2 秒的代碼
myservoLR.write(55);
延遲(2000);
數(shù)字寫入(YLED,低);// 黃色 LED 熄滅
// 機(jī)器人將車輪從左轉(zhuǎn)直的代碼
myservoLR.write(90);
延遲(15);
}
// 雙閃右轉(zhuǎn)
if ((blinks == 2) && (blinksignal > 3)) {
Serial.print("對(duì),");
Serial.print("\t雙閃");
時(shí)間=毫秒();
Serial.print("\ttime:");
序列號(hào)。打印(時(shí)間);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(閃爍信號(hào));
序列號(hào).println();
數(shù)字寫入(RLED,高);// 如果右轉(zhuǎn),紅色 LED 亮
數(shù)字寫入(YLED,低);// 黃色 LED 熄滅
閃爍信號(hào) = 0; // 為下一次閃爍重置
// 機(jī)器人右轉(zhuǎn)輪子 2 秒的代碼
myservoLR.write(120);
延遲(2000);
數(shù)字寫入(RLED,低);// 紅色 LED 熄滅
// 機(jī)器人從右轉(zhuǎn)直的代碼
myservoLR.write(90);
延遲(15);
}
}
無(wú)效循環(huán)(){
mindwave.update(串行,onMindwaveData);
}
第 5 步:上傳 Arduino 草圖并使用它
- 在計(jì)算機(jī)上啟動(dòng) Arduino 應(yīng)用程序。
- 將伺服系統(tǒng)連接到單獨(dú)的電源。伺服臂移動(dòng)了幾度,但當(dāng)草圖運(yùn)行時(shí)它們會(huì)移回中點(diǎn)。
- 將 Arduino 的 USB 電纜連接到計(jì)算機(jī)。HC-05 應(yīng)該快速閃爍。
- 斷開(kāi) HC-05 的 TXD 線與 Arduino 的 RX(引腳 0)的連接,上傳草圖,然后重新連接此 RX 線。
- 打開(kāi)串行監(jiān)視器。檢查波特率是否為 57600。
- 打開(kāi)遙控卡車的電源。
- 開(kāi)啟 MindWave。幾秒鐘后,HC-05 應(yīng)每 3-4 秒快速閃爍 2 次,表示設(shè)備已配對(duì)。
- 將 MindWave 戴在頭上并連接耳夾。它現(xiàn)在應(yīng)該將數(shù)據(jù)發(fā)送到 Arduino。
- 完成后,關(guān)閉串行監(jiān)視器。
- 關(guān)閉 MindWave。
- 斷開(kāi) USB 電纜與 Arduino 或計(jì)算機(jī)的連接。
- 退出 Arduino 應(yīng)用程序。
- 從單獨(dú)的電源上斷開(kāi)伺服的電源線。
- 關(guān)閉卡車電源。
將草圖上傳到 Arduino 后,它可以使用單獨(dú)的電源,而不是通過(guò) USB 連接到計(jì)算機(jī)。唯一的區(qū)別是沒(méi)有串行監(jiān)視器來(lái)顯示數(shù)據(jù)。步驟如下:
- 將伺服系統(tǒng)連接到單獨(dú)的電源。伺服臂移動(dòng)了幾度,但當(dāng)草圖運(yùn)行時(shí)它們會(huì)移回中點(diǎn)。
- 將 Arduino 連接到電源。
- 打開(kāi)遙控卡車的電源。
- 開(kāi)啟 MindWave。幾秒鐘后,HC-05 應(yīng)每 3-4 秒快速閃爍 2 次,表示設(shè)備已配對(duì)。
- 將 MindWave 戴在頭上并連接耳夾。它現(xiàn)在應(yīng)該將數(shù)據(jù)發(fā)送到 Arduino。
- 完成后,關(guān)閉 MindWave。
- 斷開(kāi) Arduino 與電源的連接。
- 從單獨(dú)的電源上斷開(kāi)伺服的電源線。
- 關(guān)閉卡車電源。
重要筆記
如果你的 HC-05 的固件是 2 或 3 版本,我的理解是在 AT+INQ 命令之前需要 AT+INIT 命令。我的HC-05的固件是4.0-20190815版本,AT+INIT命令不識(shí)別。要檢查 HC-05 的版本,請(qǐng)輸入以下命令:AT+VERSION
如果您按下 Arduino 的重置按鈕,這會(huì)將 HC-05 的設(shè)置恢復(fù)為出廠默認(rèn)設(shè)置。必須重復(fù)所有配對(duì)步驟。
如果在上傳草圖之前 HC-05 的 TXD 未與 Arduino 的 RX 斷開(kāi)連接,則會(huì)在計(jì)算機(jī)屏幕上 Arduino 應(yīng)用程序窗口的底部出現(xiàn)錯(cuò)誤消息。以下錯(cuò)誤消息重復(fù) 10 次:avrdude: stk500_recv(): 程序員沒(méi)有響應(yīng)avrdude: stk500_getsync() 嘗試 1 of 10: not in sync: resp=0x00
使用舵機(jī)時(shí),需要單獨(dú)的電源,例如 3 節(jié) 1.5 伏電池。Arduino 的 GND 必須連接到外部電源的負(fù)極。如果沒(méi)有外部電源,USB 源的電源似乎不足,并且 HC-05 會(huì)在伺服激活時(shí)失去配對(duì)。它在幾秒鐘后配對(duì),然后在下次伺服激活時(shí)取消配對(duì)。
?
- 自動(dòng)駕駛卡車,智周萬(wàn)物,量產(chǎn)在即.zip
- 使用腦波控制無(wú)人機(jī)飛行 0次下載
- 遙控車原理圖下載 139次下載
- 通用的紅外遙控開(kāi)關(guān)設(shè)計(jì)與實(shí)現(xiàn) 28次下載
- 無(wú)線遙控頻率計(jì)C語(yǔ)言源代碼下載 37次下載
- 使用單片機(jī)實(shí)現(xiàn)電波鐘的代碼免費(fèi)下載使用
- 如何使用51單片機(jī)進(jìn)行紅外遙控小車的設(shè)計(jì)和制作 60次下載
- 風(fēng)神遙控器正確拆卸方法步驟 15次下載
- 瑞典Einride公司推出自動(dòng)駕駛電動(dòng)卡車 11次下載
- 腦電波檢測(cè)電路 0次下載
- 腦電波調(diào)試軟件 6次下載
- 基于RTlinux的腦電波信號(hào)采集系統(tǒng)設(shè)計(jì)
- 電波傳播計(jì)算圖
- 電波的基本概念
- 電波傳輸計(jì)算軟件
- 簡(jiǎn)儀高性能平臺(tái)在小鼠腦電波實(shí)驗(yàn)中的應(yīng)用 173次閱讀
- 自動(dòng)泊車和遙控泊車的區(qū)別 1427次閱讀
- 無(wú)線遙控開(kāi)關(guān)原理 無(wú)線遙控開(kāi)關(guān)怎么配對(duì) 5481次閱讀
- 半電波暗室建設(shè)涉及的幾個(gè)方面 1060次閱讀
- 紅外遙控與藍(lán)牙遙控的區(qū)別,紅外遙控與藍(lán)牙遙控哪個(gè)好 3.4w次閱讀
- 全電波暗室與半電波暗室的電磁兼容設(shè)計(jì) 1806次閱讀
- 腦電波如何實(shí)現(xiàn)追蹤虛擬現(xiàn)實(shí)控制 3826次閱讀
- dfrobotIR kit紅外遙控簡(jiǎn)介 1586次閱讀
- 無(wú)線電波的傳播方式和頻率分配 2w次閱讀
- 帶你了解無(wú)線電遙控技術(shù) 9902次閱讀
- 機(jī)械手臂為你加持!再也不擔(dān)心雙手忙不過(guò)來(lái)了 4286次閱讀
- 全球六大自動(dòng)駕駛卡車 硬件配置及方案對(duì)比 7578次閱讀
- 電燈遙控開(kāi)關(guān)怎么接線_電燈遙控開(kāi)關(guān)接線原理圖 13w次閱讀
- 特斯拉推出電動(dòng)卡車_特斯拉電動(dòng)卡車性能如何 1520次閱讀
- 生物識(shí)別新技術(shù)—基因、腦電波識(shí)別 2141次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論