 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
概述
在這個項目中,我將展示我使用麥克納姆輪子構(gòu)建和控制全向汽車的過程。該車將由無線 PS2 控制器控制,包括用于速度指示的 LED、小型壓電喇叭和用于物體檢測的 HC-SR04 傳感器。
底盤_
我使用的底盤以套裝形式出售(EMOZY 麥克納姆輪機器人套件)并在亞馬遜上購買。
這包括:
- 四個麥克納姆輪
- 四個帶齒輪箱的直流電機
- 兩個底盤板
- 僵局
然而,自己收集零件相當容易,Adafruit 銷售非常相似的電機和變速箱。
只需確保車輪可以與您購買的電機配合使用。底盤板可能有點難以獲得。
集會
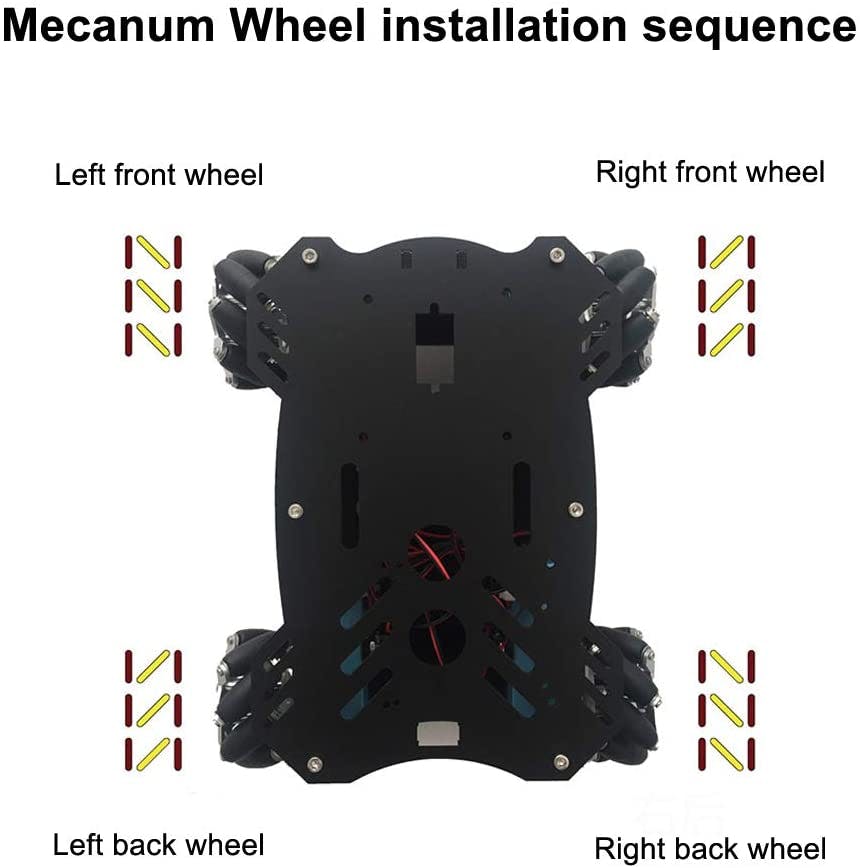
如果您的電機沒有附帶電機引線,我首先建議您焊接電機引線。哪條線索去哪里并不重要,只要確保線索足夠長,適合您的用例。如果您使用的是底盤套件,按照說明進行組裝相當容易。請記住,輪子需要沿著特定的方向行駛,其中兩個輪子用于右側(cè),兩個用于左側(cè)。這張照片應(yīng)該有幫助。
我還包括一個從 pololu 機器人 購買的額外底盤板,用于容納 Arduino 和面包板。這是可選的,但額外的空間值得贊賞。
我使用 M3 支架安裝了頂板。這為電池組和 PS2 控制器接收器騰出了空間。
安裝硬件
我使用的硬件包括:
- Arduino UNO
- Adafruit 電機護罩 V2
- 電子-沙龍端子屏蔽
- Lynxmotion PS2 接收器分線板。
- 6 X AA 電池組,帶筒形插孔連接器
- 兩個用于 LED 和壓電的 400 點面包板
- 開/關(guān)
我首先將電池組貼在中間板上。重要的是要確保在汽車行駛時它不會移動太多。我還按下了旁邊的開/關(guān)開關(guān)。然后將 PS2 分線板安裝到頂板的下側(cè)。Arduino Uno(連同兩個防護罩)使用 M2.5 支架連接到頂板。我還將兩個面包板連接到頂板上。HC-SR04 模塊使用隨附的安裝硬件連接到汽車的前部和后部。方便地,EMONZY 底盤板帶有與 HC-SR04 安裝支架相匹配的螺絲孔。有很多方法可以將所有這些物品安排在車上,可能比我做的更好,但它對我有用。
接線
我附上了整輛車的接線圖,但它很忙。下面是 Arduino 和電機護罩上所有東西的接線位置的細分。
直流電機:
電機屏蔽端子 M1 至 M4:正極和負極端子。(無需使用 GND 端子)
我建議在開始之前查看電機護罩上的 adafruits 文章。很多很棒的信息。
同樣對于大多數(shù)直流電機,很難分辨出接線的方向。建議單獨測試每個電機,如果運行方向錯誤,則更換接線。
PS2 接收器突破:
DAT -> 引腳 12
CMD -> 引腳 11
ATT -> 引腳 10
時鐘 -> 引腳 13
5V -> 5V
接地 -> 接地
HC-SR04:(我向您展示了代碼使用的引腳,但可以連接到任何數(shù)字引腳)
前傳感器 -
接地 -> 接地
回聲 -> 引腳 2
觸發(fā) -> 引腳 3
VCC -> 5V
背部傳感器 -
接地 -> 接地
回聲 -> 引腳 4
觸發(fā) -> 引腳 9
VCC -> 5V
紅色 LED:
陽極 -> 引腳 7
陰極 -> GND
黃色 LED:
陽極 -> 引腳 6
陰極 -> GND
綠色 LED:
陽極 -> 引腳 5
陰極 -> GND
藍色 LED:
陽極 -> 引腳 1
陰極 -> GND
*注意:我通常不會使用引腳 1,但我沒有引腳。因為引腳 1 和 0 用于串行通信,所以您不能使用串行庫。如果您確實需要使用串行庫,請考慮去掉這個 LED。
佩佐:
引腳 8 和 GND
控制方案:

已完成項目:
如何改進這個項目:_
- 更清潔的布線(可能使用焊接原型板)
- 更多用于側(cè)面物體檢測的 HC-SR04 傳感器
- 編碼器有助于解決車輪打滑問題
- Broken CircleCI構(gòu)建和粒子網(wǎng)格
- 麥克納姆汽車項目
- 基于STM32的麥克納姆輪小車的尋跡實現(xiàn)
- STM32:麥克納姆輪進行循跡任務(wù)(庫函數(shù)程序代碼)
- 麥克納姆輪PID控制原理
- 使用STM32F103C8T6控制L298N電機驅(qū)動麥克納姆輪小車(HAL庫)
- 如何創(chuàng)建和使用LabVIEW中的LLB文件 0次下載
- 汽車底盤基礎(chǔ).德國-耶爾森.賴姆帕爾著 0次下載
- ADMP803:助聽器全向MEMS麥克風過時數(shù)據(jù)表
- 如何通過測程法進行四輪全向移動機器人定位 13次下載
- 使用51單片機控制智能小車一個輪子轉(zhuǎn)動的程序免費下載
- 基于Arduino的麥克納姆輪小車電路原理圖免費下載 20次下載
- 基于STM32和CAN的控制系統(tǒng)設(shè)計 13次下載
- 麥克風陣列波束成形 165次下載
- 雪鐵龍賽納汽車維修手冊
- PyTorch神經(jīng)網(wǎng)絡(luò)模型構(gòu)建過程 276次閱讀
- 交換芯片的構(gòu)建過程 596次閱讀
- 自動導引車(AGV)控制系統(tǒng)的實現(xiàn)過程 713次閱讀
- 什么是全向天線?全向天線的應(yīng)用和種類 3712次閱讀
- Dockerfile定義Docker鏡像的構(gòu)建過程 2371次閱讀
- 智能汽車芯片設(shè)計及制造過程 1899次閱讀
- 電工知識—TIA Portal(博途)創(chuàng)建和編輯項目 3731次閱讀
- 構(gòu)建具有納伏靈敏度的低噪聲儀表放大器 1247次閱讀
- OpenHarmony應(yīng)用的編譯構(gòu)建過程 3637次閱讀
- dfrobot優(yōu)質(zhì)橡膠輪子簡介 732次閱讀
- MEMS麥克風陣列的基礎(chǔ)知識及工作原理和應(yīng)用介紹 1.2w次閱讀
- Zedboard HDMI核的構(gòu)建和輸出顯示測試 6393次閱讀
- 關(guān)于麥克風波束成形的基本原理 6997次閱讀
- 構(gòu)建可啟動的系統(tǒng)鏡像的過程 1042次閱讀
- 無煩惱,高增益: 構(gòu)建具有納伏級靈敏度的低噪聲儀表放大器 4007次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論