 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
?

有一個教練機器人和幾個女運動員相互連接到下面。
您可以在其中連接任意數量的機器人。唯一需要的一個條件是,它連接到前一個的每個機器人,它都沒有與最后一個分離,超過將它們連接在一起的藍牙信號的范圍。另一方面,信號可以穿過墻壁和門。即,可以連接例如其中的1000個機器人,由第一個通過從屬藍牙模塊HC-06控制。也可以按建筑物的樓層和房間分布。我買了 3 臺 Arduino 機器人 Smart BAT CAR
對于這個項目,我使用了一個 HC-06 模塊和幾個 BLE(藍牙低功耗)類型的 HM-10 模塊。這些最后消耗的比第一個少。要將您的手機正確連接到 HM-10 模塊,您必須使用 5.0 以上的 Android 操作系統。但是因為我有一個安卓 4.4.2 的移動三星 S4 Mini,所以我很方便地將 HC-06 用作主機器人的從模塊,將 HM-10 用作其他機器人的從模塊。HC-06 它是經典的藍牙,不是 BLE。
那么,我與教練機器人一起使用:
處于從屬模式的 HC-06。它配備了BAT CAR機器人。
一個 HM-10 藍牙 BLE 4.0,處于主模式,用于連接以下女運動員機器人的從機。
在兩個女運動員機器人中,我使用以下模塊:
HM-10 slave,用于連接前一個機器人。
HM-10 主連接到以下女運動員。
其他收購:
Vigos 的 Electronson 實體店中的跨接電纜
DFPlayer Mini MP3,因為它能夠播放音樂:
32G micro SD 卡,用于存儲歌曲和語音命令,以及可能與項目相關的所有文件。沒有必要這么多千兆字節:

3W 揚聲器,用于連接 MP3 播放器:

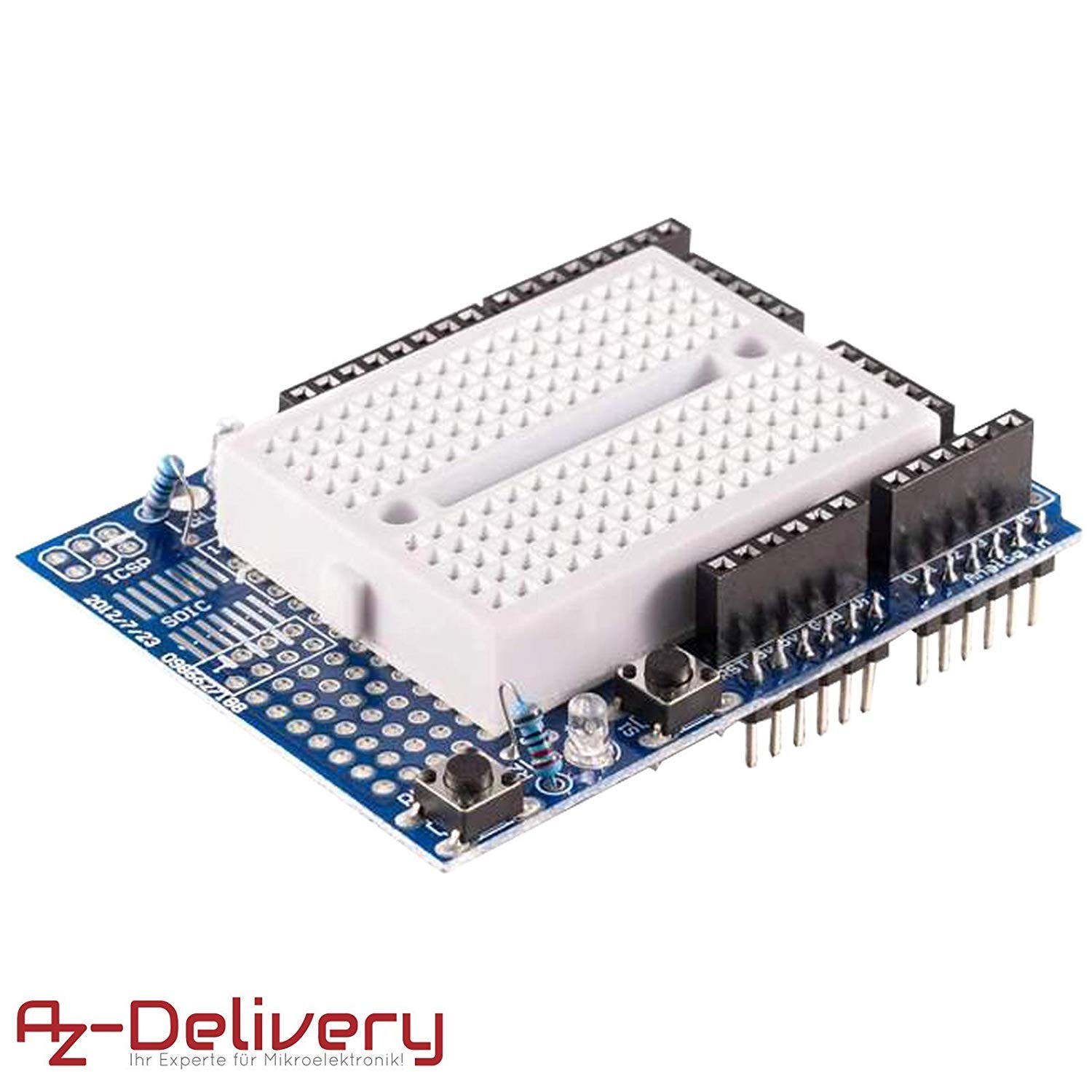
一個原型盾牌。這不是絕對必要的。需要的是一個miniprotoboard 。protoshiesld 與 SCL 和 SDA 引腳重疊,因此,為了避免它,它需要切割一個錐角。
USB 轉 TTL 系列電纜,用于對藍牙模塊進行編程。HC-06 和 HM-10 可以直接插拔。有必要交叉設備各自的RX 和 TX進行連接。

HC-06 模塊的設置:
AT+NAME<名稱>
例如:AT+NAMEHC-06leader
AT+BAUD<號碼>
例如:AT+BAUD8
8=>115200
設置大師 HM-10 :
AT 9600 不帶線調整(默認)
AT+名字?
AT+NAMEMaestro1
AT+BAUD4 => 115200
AT+MODE2(發送、接收)
AT+ROLE1(中央,主控)
最后一條命令重置模塊。再次打開115200的串口監視器,無需線路調整。
AT+IBEA0(沒有 ibeacon)。默認。
AT+TYPE0(無 PIN)。默認。
設置從機 HM-10:
AT 9600 不帶線調整(默認)
AT+地址?用于獲取 MAC
AT+BAUD4
AT+MODE2(發送、接收)
AT+ROLE0(從機)(有復位)
AT+IBEA0(無 ibeacon)(默認)
AT+TYPE0(默認)
AT+IMME1(用于通過 AT+CON 請求連接到主控)
AT+IMME0(如果是第一次連接,需要立即連接)
項目步驟
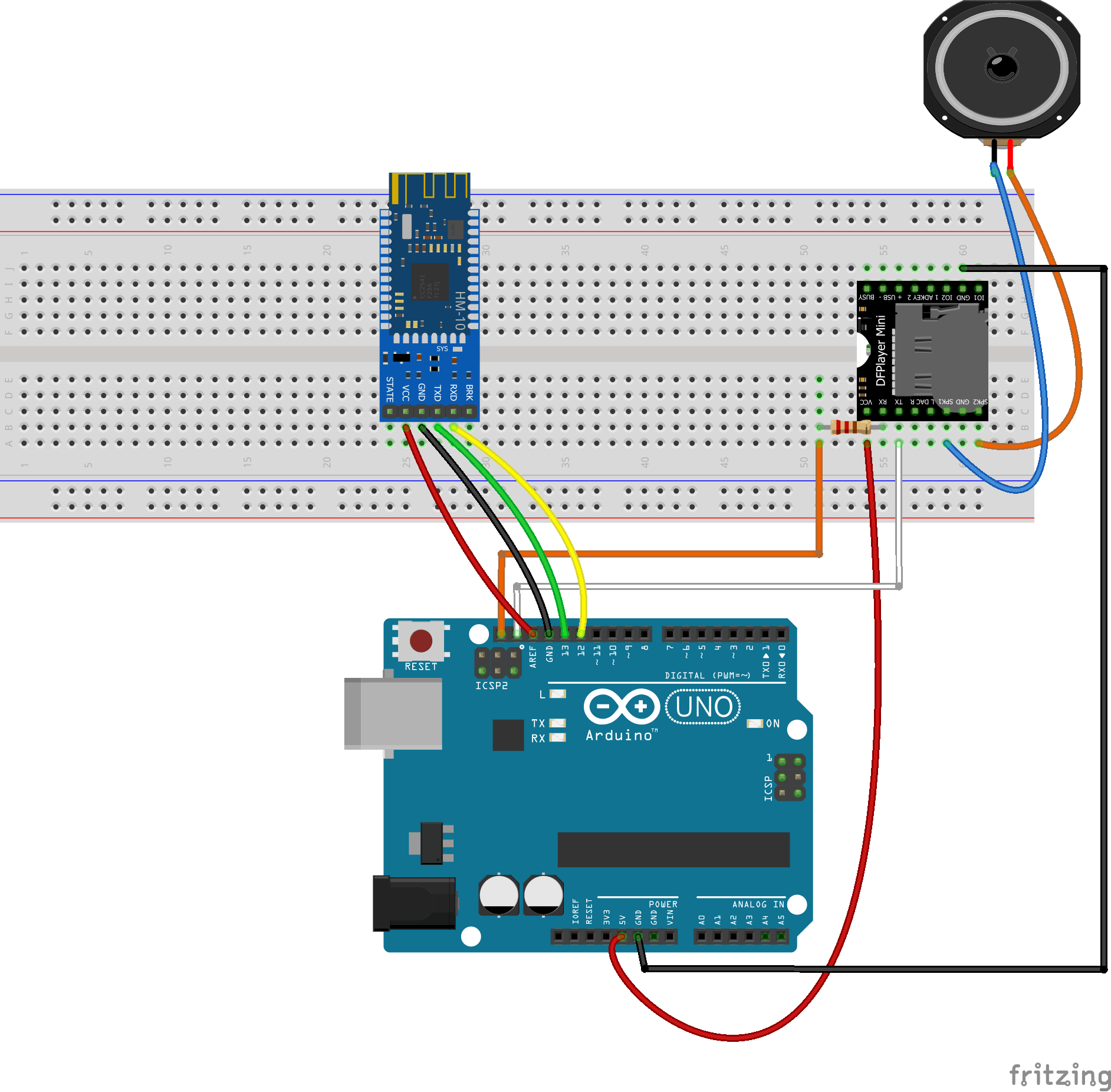
通過AT指令設置藍牙模塊,安裝到機器人上。在每個機器人上使用兩個模塊,除了最后一個。將 protoshield 放在主(教練)機器人上。將MP3 迷你播放器連接到 Arduino,如下圖所示:
在 Yahboom 的 Arduino BAT CARS 附帶的代碼中添加新功能。就像古希臘人已經知道的基于數學的螺旋()和圓() :
void circle ()
{
int slow;
// right motor back off
digitalWrite(Right_motor_back, LOW);
analogWrite(Right_motor_go, control); // PWM--Pulse Width Modulation(0~255) control speed
// left motor go ahead
digitalWrite(Left_motor_back, LOW);
slow = (int)(control * 2 / 3);//without decimals
analogWrite(Left_motor_go, slow); // PWM--Pulse Width Modulation(0~255) control speed
//speed of left wheel is two thirds of right wheel
}
void spiral(){
int rightWheel = 200;
analogWrite(Right_motor_go, rightWheel); //I already do not use digitialWrite HIGH
for (int leftWheel = 50; leftWheel <= 150; leftWheel += 5)
{
analogWrite(Left_motor_go, leftWheel);
delay(250);
}
}
或者閱讀皇家馬德里的旋律,這要歸功于蜂鳴器和不同的延遲:
void madrid()
{
//2 spaced sounds
digitalWrite(BUZZER, LOW);
delay(75);
digitalWrite(BUZZER, HIGH);
delay(400);
digitalWrite(BUZZER, LOW);
delay(75);
digitalWrite(BUZZER, HIGH);
delay(400);
//3 sounds
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(75);
digitalWrite(BUZZER, HIGH);
delay(400);
//another 4 sounds
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(75);
digitalWrite(BUZZER, HIGH);
delay(400);
//2 sounds
digitalWrite(BUZZER, LOW);
delay(50);
digitalWrite(BUZZER, HIGH);
delay(200);
digitalWrite(BUZZER, LOW);
delay(75);
digitalWrite(BUZZER, HIGH);
delay(200);
}
此外,根據 MP3 播放器模塊 的庫規定的條件,根據需要將歌曲添加到 SD 存儲卡上記錄的命令。還將這個庫的新命令合并到主要的 Arduino 程序中。
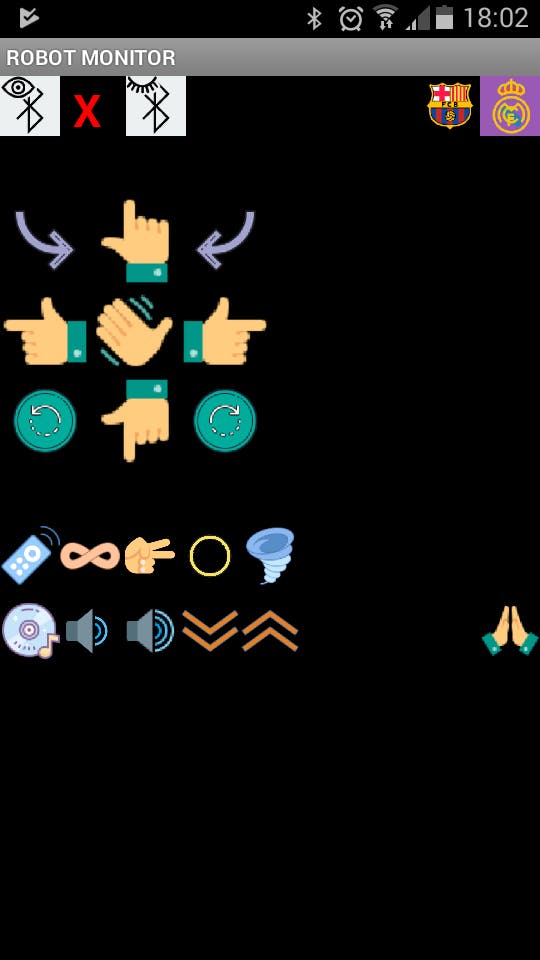
最后在 App Inventor 上創建一個應用來管理教練機器人。只有我們必須配置按鈕來發送命令。由Arduino主程序的serialEvent()函數讀取的。我們已經可以做到這三個機器人同時進行相同的訓練。
我只使用表情符號完成了該應用程序,因此任何語言的任何人都可以理解:
捐
如果您喜歡我們的帖子,請考慮捐款,以便我們繼續。
- 瞳步迎賓講解機器人
- 瞳步消毒機器人方案
- ABB機器人CP中級應用培訓 11次下載
- 了解機器人電子教材下載 19次下載
- 三寶機器人軟件操作系統v2.20.33.100下載 3次下載
- 基于機器人操作系統的市內運輸自動導引車系統 3次下載
- 機器人無線充電電路設計 47次下載
- 基于Matlab的機構與機器人分析資料下載 11次下載
- 基于DSP和PC的農業機器人控制系統 17次下載
- 2021年機器人考試三級真題匯總下載 2次下載
- 基于DSP芯片的足球機器人實現與設計 26次下載
- Arduino教學機器人的使用教程免費下載 37次下載
- 機器人設計教程之機器人控制和決策子系統 23次下載
- 基礎機器人學與寶貝車機器人 0次下載
- 教育機器人三維軟件系統的設計與實現
- 機器人的三大矩陣是什么及關系式 122次閱讀
- 如何利用TinyML實現語音識別機器人車的設計 2110次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 機器人底盤的主要三大技術 8064次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3270次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 創建智能車機器人smartcar的步驟教程詳解 4340次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀
- 智能機器人的三大關鍵技術詳解 3.2w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DC電源插座圖紙
- 0.67 MB | 1次下載 | 免費
- 2AN84-線性技術雜志電路集,第一卷第四集
- 2.28MB | 次下載 | 免費
- 3AN43-橋式電路
- 3.64MB | 次下載 | 免費
- 4AN69-LT1575超快線性控制器提供快速瞬態響應電源
- 218.44KB | 次下載 | 免費
- 5AN98-2004年秋季的信號源、調理器和電源電路
- 864.98KB | 次下載 | 免費
- 6高頻7代電源說明書
- 1.04 MB | 次下載 | 免費
- 7AN-616:AD9430評估板對XTAL振蕩器時鐘的修改
- 162.24KB | 次下載 | 免費
- 8AN-237: 放大器直接數字頻率合成的DAC選型器應用漫談
- 461.58KB | 次下載 | 免費
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 450次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 137次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 128次下載 | 免費
- 4使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 53314A函數發生器維修手冊
- 16.30 MB | 31次下載 | 免費
- 6美的電磁爐維修手冊大全
- 1.56 MB | 22次下載 | 5 積分
- 7如何正確測試電源的紋波
- 0.36 MB | 15次下載 | 免費
- 8感應筆電路圖
- 0.06 MB | 10次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論