 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
本方案是一個基于 Arduino UNO 的自動駕駛無人機(jī)。
帶有多個傳感器和由兩個微控制器控制的無線攝像頭的 Arduino Uno 自動駕駛無人機(jī)。
通常我們會看到無人機(jī)使用射頻遙控器進(jìn)行控制,或者使用 GPS 模塊進(jìn)行自動駕駛,通過它給出正確的方向來自動控制它。但在我的項(xiàng)目中,我使用 Arduino Uno 以另一種方式處理事情。
該項(xiàng)目的主要目標(biāo)是從特定的已知區(qū)域收集數(shù)據(jù)和 2D 視頻信息。為了獲取信息,我們必須使用Arduino編程分配無人機(jī)可以行駛的長度和寬度值。
顧名思義,自動駕駛儀意味著無人機(jī)將自己處理,而無人機(jī)的控制動作將由內(nèi)置傳感器來平衡無人機(jī)的飛行控制器處理。Arduino Uno 是系統(tǒng)的大腦,它向飛行控制器提供正確的信號。為了保持穩(wěn)定性和持續(xù)運(yùn)行,我使用了 OpenPilot CC3D 微控制器(或任何飛行控制器)和一個攝像頭,通過天氣監(jiān)測傳感器捕捉實(shí)時數(shù)據(jù)。最后,該系統(tǒng)包括一個藍(lán)牙模塊,用于打開/關(guān)閉無人機(jī)并使用 Android 移動設(shè)備顯示實(shí)時數(shù)據(jù)。
阿杜諾UNO
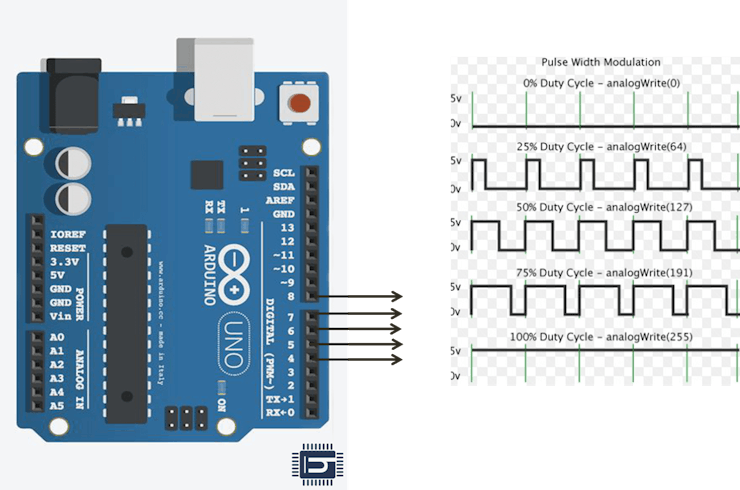
正如我們所知,arduino Uno 是 Atmega 微控制器。在這里,我生成了 PWM 信號來控制無人機(jī)。
CC3D飛行控制器:
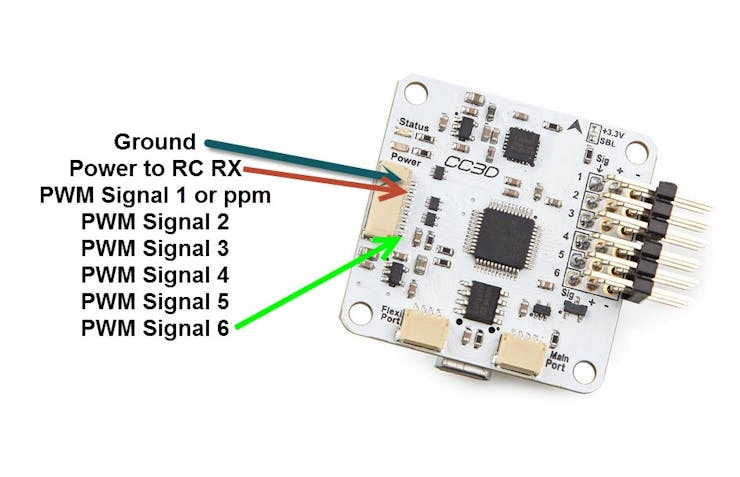
正如我們在上圖中看到的,飛行控制器具有內(nèi)置的陀螺儀和加速器控制器以及自動調(diào)平功能。
但是這些微控制器公司提供了自己的軟件來對其進(jìn)行編程,并且使用起來非常友好。
這些微控制器需要一個 PWM 信號作為輸入來控制各個 BLDC 電機(jī)。這些信號將由 arduino uno 生成。
無人機(jī)設(shè)計的類型
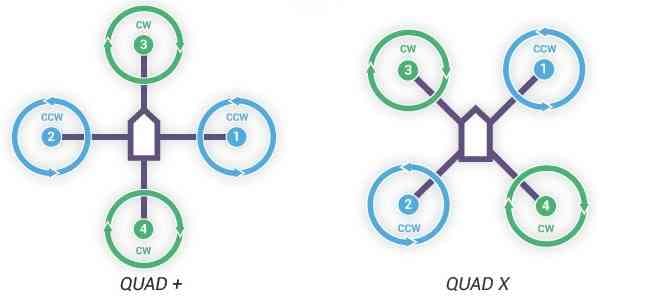
正如您在上面看到的,有兩種類型的無人機(jī)設(shè)計可用于四格式無人機(jī),根據(jù)您放置飛行控制器的方向,您可以選擇四格式
方向指示將根據(jù)所選飛行控制器打印,對于所選格式,螺旋槳方向也是最重要的,CW(順時針)和 CCW(逆時針)。
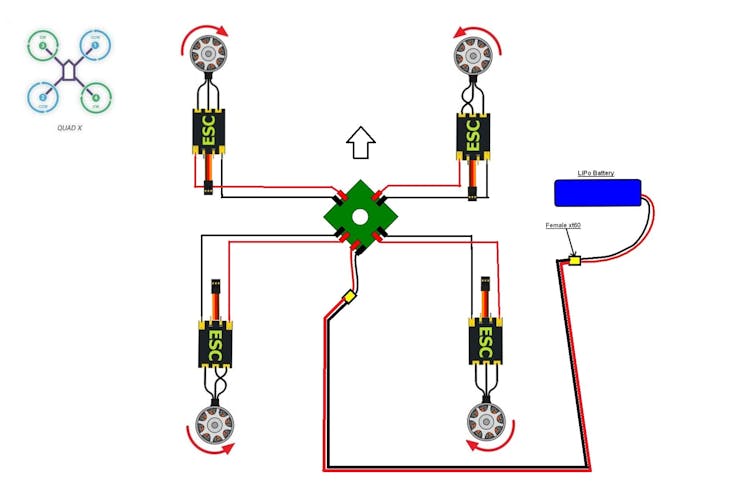
電調(diào)連接
順時針

我們需要按順時針方向連接電線,如上圖所示
逆時針
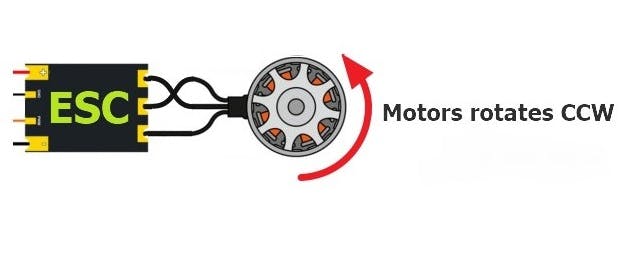
對于逆時針,我們需要交換任何兩根電線,以便將電壓的相位施加到電機(jī)上,從而改變電機(jī)方向
電機(jī)-ESC-飛行控制器連接
電調(diào)控制連接
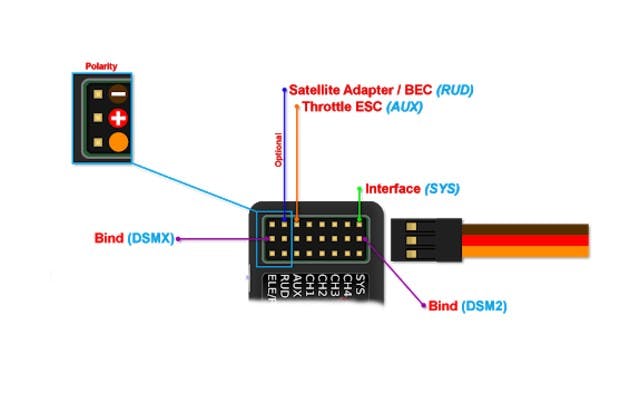
ESC 也有 3 根電線和 2 根電源線,
這 3 條線具有 VCC、接地和輸入信號引腳,這些引腳從飛行控制器獲取數(shù)據(jù)以旋轉(zhuǎn) BLDC 電機(jī)。
其他 2 線是額定電流較高的電源線,因此請使用較粗的電線,這些電纜與電池共用。
使用 ARDUINO UNO 的最終接線圖
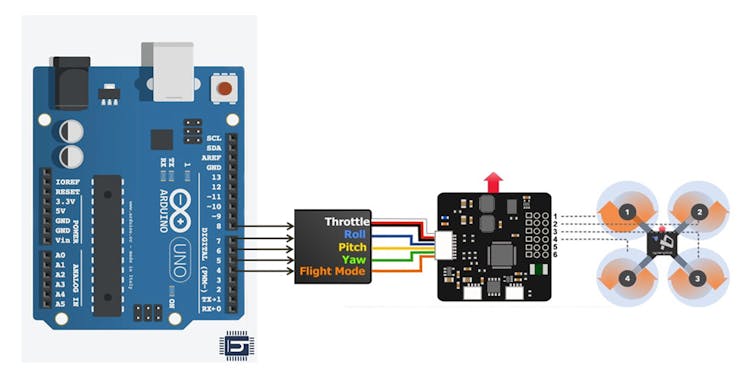
在這里我使用了 UART 協(xié)議,但沒有數(shù)據(jù)被并行轉(zhuǎn)換為串行。關(guān)于延遲,直接 PWM 信號從 arduino 施加到 CC3d。
移動應(yīng)用

上面的快照顯示了使用下面提到的開源網(wǎng)站構(gòu)建的 android 應(yīng)用程序。使用這個應(yīng)用程序,我們可以打開和關(guān)閉無人機(jī)。并且還有另一個功能可以讓我們在串行窗口中獲取傳感器數(shù)據(jù),那就是手機(jī)。
紐扣
start : 此按鈕將啟動微控制器(CC3D 飛控)
mov:這使無人機(jī)飛行并執(zhí)行其在arduino Uno內(nèi)部編程的操作
停止:這是一個關(guān)閉無人機(jī)的緊急停止按鈕(由于自動駕駛無人機(jī)沒有遙控器,因此提供了額外的按鈕)
啟動傳感器:按下時它會在白色屏幕上顯示傳感器數(shù)據(jù),如下圖所示
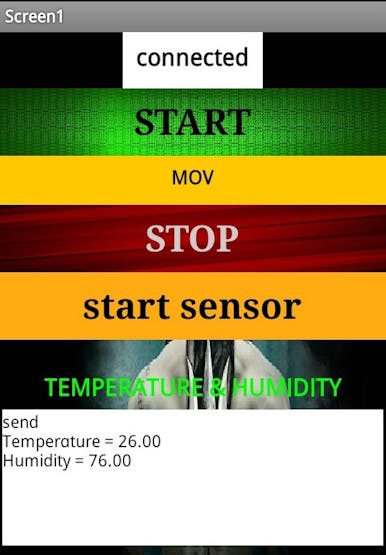
我們可以在該圖中看到按下啟動傳感器按鈕時將顯示值的溫度和濕度。
- Arduino無人機(jī)YMFC-32-C
- 基于Arduino的無人機(jī)構(gòu)建
- 使用腦波控制無人機(jī)飛行 0次下載
- 基于Arduino的無人機(jī) 1次下載
- Arduino無人機(jī)開源分享
- 無人機(jī)盾牌Arduino開源項(xiàng)目
- Arduino Uno國內(nèi)改版電路原理圖下載 0次下載
- 小型電動無人機(jī)的總體參數(shù)設(shè)計方法研究說明 19次下載
- 無人機(jī)為什么一夜爆紅開源飛控起到了什么樣的作用
- 無人機(jī)和無人機(jī)控制方法及無人機(jī)遠(yuǎn)程操控系統(tǒng)方法說明 69次下載
- 無人機(jī)中繼模塊和無人機(jī)圖傳控制系統(tǒng)介紹 60次下載
- 基于無人機(jī)的分類 20次下載
- 基于STM32的無人機(jī)姿態(tài)測量系統(tǒng)設(shè)計 44次下載
- ADI民用無人機(jī)解決方案 19次下載
- 基于ARM處理器的小型無人機(jī)自動駕駛儀的設(shè)計
- 如何自制一個自動駕駛無人機(jī) 7037次閱讀
- 無人機(jī)群的神秘面紗 無人機(jī)的未來發(fā)展路線 1451次閱讀
- 自動駕駛和無人駕駛到底是不是一個概念? 7167次閱讀
- 怎樣使無人機(jī)安全飛行?無人機(jī)飛行需要掌握什么安全知識 1.5w次閱讀
- 新疆為什么禁飛無人機(jī)_新疆無人機(jī)禁飛區(qū)域 5.7w次閱讀
- 水下無人機(jī)的用途和優(yōu)勢有哪些 9214次閱讀
- 水下無人機(jī)原理分析 1.3w次閱讀
- nixie微型無人機(jī)的功能介紹_nixie微型無人機(jī)多少錢 1.3w次閱讀
- 微型無人機(jī)發(fā)展前景_無人機(jī)發(fā)展趨勢 8416次閱讀
- 大疆做不做軍用無人機(jī) 2w次閱讀
- 中國有哪些軍用無人機(jī)_國內(nèi)軍用無人機(jī)排名 11.2w次閱讀
- 大疆無人機(jī)如何在禁飛區(qū)起飛 15.1w次閱讀
- 中國無人機(jī)技術(shù)型號種類介紹 3.4w次閱讀
- 電動無人機(jī)和油動無人機(jī)性能的對比 2710次閱讀
- 超全面的無人機(jī)入門知識 1.2w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論