 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
Xilinx 提供了 Vitis? Video Analytics SDK,我們可以使用它來運行我們自己的對象檢測。我們將展示如何使用 yolov4-tiny 訓練您的自定義數據集并在 KV260 上運行它。
確保您已準備好以下工作:
- 安裝智能相機應用:https ://xilinx.github.io/kria-apps-docs/main/build/html/docs/smartcamera/docs/app_deployment.html
- 安裝 Vitis AI:https ://github.com/Xilinx/Vitis-AI (1.4 版)
1.在yolov4-tiny上訓練一個自定義數據集
一個。git clone https://github.com/XiongDa0001/yolov4-tiny-keras
灣。制作 VOC 格式的數據集
C。運行 voc_annotation.py 得到 2007_train.txt 和 2007_val.txt 進行訓練
d。修改 classes_path 中的內容以包含您檢測到的內容
e. 安裝 tensorflow-gpu==1.13.1 和 Cuda 10.0 或 10.1
更多訓練過程請參考https://github.com/bubbliiiing/yolov4-tiny-keras
2.將h5轉換為pb
我們的代碼提供了一個轉換腳本keras2pb.py 。
您應該按如下方式修改變量:
一個。指定input_model
乙。指定output_model
C。指定num_class
然后你會得到 freeze pb 文件。
3.模型量化
該項目使用Vitis-AI 1.4 。首先進入docker環境,然后
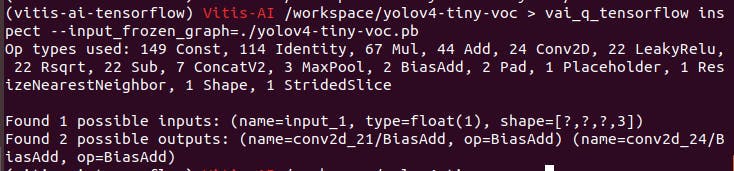
在量化之前,可以使用如下命令查看mode的輸入輸出節點
vai_q_tensorflow inspect --input_frozen_graph=~.pb
量化需要準備如下:
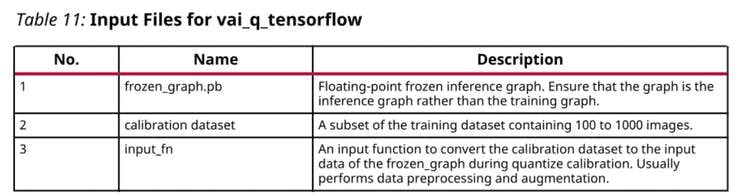
input_fn.py如下:
from PIL import Image
import numpy as np
def letterbox_image(image, size):
'''resize image with unchanged aspect ratio using padding'''
iw, ih = image.size
w, h = size
scale = min(w/iw, h/ih)
nw = int(iw*scale)
nh = int(ih*scale)
image = image.resize((nw,nh), Image.BICUBIC)
new_image = Image.new('RGB', size, (128,128,128))
new_image.paste(image, ((w-nw)//2, (h-nh)//2))
return new_image
#image = Image.open(img_path)
def preprocessing_fn(image, model_image_size=(416,416)):
if model_image_size != (None, None):
assert model_image_size[0]%32 == 0, 'Multiples of 32 required'
assert model_image_size[1]%32 == 0, 'Multiples of 32 required'
boxed_image = letterbox_image(image, tuple(reversed(model_image_size)))
else:
new_image_size = (image.width - (image.width % 32), image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
image_data /= 255.
return image_data
calib_image_dir = "calibrate_images"
calib_image_list = "calibrate.txt"
calib_batch_size = 8
def calib_input(iter):
images = []
line = open(calib_image_list).readlines()
for index in range(0, calib_batch_size):
curline = line[iter * calib_batch_size + index]
image_name = curline.strip()
image = Image.open(image_name)
image = preprocessing_fn(image)
images.append(image)
return {"input_1": images}
我們提供get_name.py來獲取每個圖像的名稱。
#!/usr/bin/python
#coding:utf-8
import os
num=0
path_imgs = './calibrate_images'
for files in os.listdir(path_imgs):
print(files)
img_path = path_imgs + '/' + files
num = num + 1
with open("./calibrate_images/calibrate.txt", "a") as f:
f.write(str(img_path) + '\n')
創建一個“量化”文件夾來保存量化文件
* 下一步是量化模型。
vai_q_tensorflow quantize \
--input_frozen_graph ./yolov4-tiny-voc.pb \
--input_nodes input_1 \
--input_shapes ?,416,416,3 \
--output_dir ./quantize \
--output_nodes conv2d_21/BiasAdd,conv2d_24/BiasAdd \
--input_fn input_fn.calib_input \
--calib_iter 25
calibrate_images 數量 = calib_iter * calib_batch_size
然后你會在quantized文件夾下得到quantize_eval_model.pb
4. 編譯模型
VAI_C 的常用選項如下所示。
--arch:JSON 格式的 VAI_C 編譯器的 DPU 架構配置文件。它包含編譯期間云和邊緣 DPU 的專用選項。
您需要創建 arch.json 文件,如下所示:
{
"target": "DPUCZDX8G_ISA0_B3136_MAX_BG2"
}
- --frozen_pb:量化文件(quantize_eval_model.pb )
- --output-dir:存放編譯輸出的文件夾
- --net_name:VAI_C編譯后網絡模型的DPU內核名稱
有時,T ensorFlow 模型不包含輸入張量形狀信息,導致編譯失敗。您可以使用
--options '{"input_shape":"1, 224, 224, 3"}'指定輸入張量形狀。
創建一個“編譯”文件夾來保存量化文件
使用以下命令獲取xmodel文件
vai_c_tensorflow \
--f ./quantize14/quantize_eval_model.pb \
--a kv260arch_B3136.json \
--output_dir compile \
--n mask_detection \
--options '{"input_shape": "1,224,224,3"}'
5. 數據準備
我們需要準備以下文件,這些文件位于我的 github https://github.com/XiongDa0001/yolov4-tiny-keras
├─face_mask
|_____aiinference.json
|_____drawresult.json
|_____preprocess.json
└─mask-detection-yolo4-tiny
|_____mask-detection-yolo4-tiny.prototxt
|_____mask-detection-yolo4-tiny.xmodel
|_____label.json
將“face_mask”文件夾放在 /opt/xilinx/share/ivas/smartcam 文件夾中
同時,將“mask-detection-yolo4-tiny”放入/opt/xilinx/share/ivas/vitis_??ai_library/models/kv260-smartcam文件夾中
6.運行模型
sudo xmutil unloadapp
sudo xmutil loadapp kv260-smartcam
sudo smartcam --mipi -W 1920 -H 1080 --target dp -a face_mask
這是一個運行示例的演示

?
- Kria KV260視覺AI入門套件用戶指南
- 適用于AWS IoT Greengrass的Xilinx KV260入門指南
- 基于DeepSORT YOLOv4的目標跟蹤
- 創建自定義Kria KV260加速ML應用程序
- 使用KV260進行事故檢測
- 使用Xilinx KV260對智能家居設備進行手勢控制
- Vitis ai 1.4 KV260鏡像開源
- 為Kria KV260添加USB WiFi
- Nvidia Jetson Nano面罩Yolov4探測器
- Kria KV260 AI視覺套件入門
- Xilinx Kria KV260套件的第一個硬件項目
- Vivado 2021.1中的Kria KV260入門
- 使用Xilinx Kria KV260進行AI火災探測
- Kria KV260上的動態交通燈系統
- 基于Tengine實現yolov4的cpu推理
- AMD Kria KR260 DPU配置教程3 1098次閱讀
- 深入淺出Yolov3和Yolov4 581次閱讀
- 如何在KV260上快速體驗Vitsi AI圖像分類示例程序 1289次閱讀
- 在AI愛克斯開發板上用OpenVINO?加速YOLOv8-seg實例分割模型 764次閱讀
- 在AI愛克斯開發板上用OpenVINO?加速YOLOv8-seg實例分割模型 849次閱讀
- AI愛克斯開發板上使用OpenVINO加速YOLOv8目標檢測模型 1067次閱讀
- 在AI愛克斯開發板上用OpenVINO?加速YOLOv8目標檢測模型 1134次閱讀
- 使用旭日X3派的BPU部署Yolov5 734次閱讀
- 英偉達Jetson設備上的YOLOv8性能基準測試 5550次閱讀
- 復雜野外環境下油茶果快速魯棒檢測算法 875次閱讀
- YOLOv5在OpenCV上的推理程序 1681次閱讀
- 深度解析YOLOv7的網絡結構 7281次閱讀
- 關于YOLOU中模型的測試 741次閱讀
- 在u-boot中使用ethernet的方法 3671次閱讀
- 如何在LiDAR點云上進行3D對象檢測 2032次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論