 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
想像 Simone Giertz一樣酷,但不知道從哪里開始?
InterbotiX Arm Link 軟件為兼容 Arduino 的機(jī)械臂提供了一個(gè)簡(jiǎn)單的界面。使用該軟件,您可以通過多種運(yùn)動(dòng)模式控制機(jī)械臂,包括笛卡爾 IK 模式、圓柱 IK 模式和反鏟/關(guān)節(jié)模式。
除了直接控制您的機(jī)械臂外,Arm Link 軟件還可以激活數(shù)字輸出、讀取模擬輸入、播放運(yùn)動(dòng)序列和顯示網(wǎng)絡(luò)攝像頭饋送。
該軟件作為這些機(jī)械臂的簡(jiǎn)單控制解決方案提供,同時(shí)也是希望將機(jī)械臂集成到自己的應(yīng)用程序和系統(tǒng)中的個(gè)人的示例。InterbotiX Arm Link 是一個(gè)在處理環(huán)境中用 Java 編寫的開源程序。Arm Link 軟件目前兼容:
在本教程中,我們將介紹帶有 Arm Link 軟件的RobotGeek Snapper Arm的設(shè)置和使用。如果您想設(shè)置其中一個(gè) InterbotiX 手臂,您可以按照本指南進(jìn)行操作,該指南將為您設(shè)置適合您的機(jī)器人手臂的固件。
第 1 步:設(shè)置您的機(jī)械臂硬件
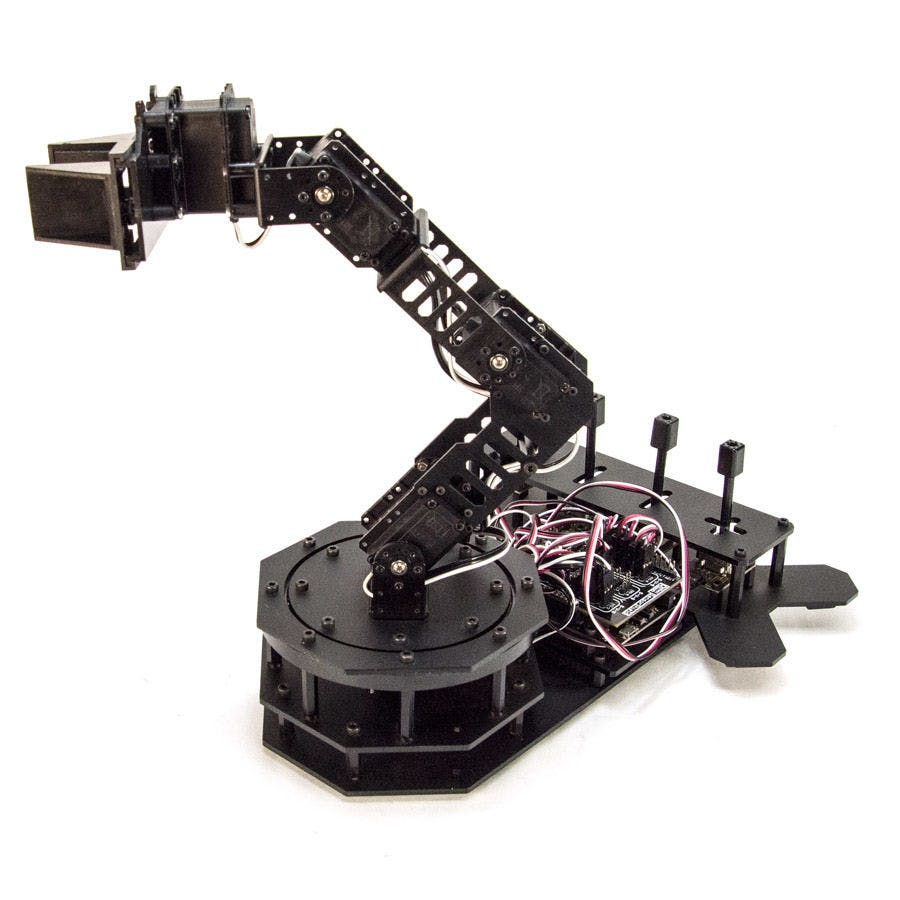
RobotGeek Snapper 機(jī)器人手臂套件隨附本教程所需的所有機(jī)器人硬件 - 您只需要一臺(tái) Windows、Mac 或 Linux 計(jì)算機(jī)。
這個(gè)項(xiàng)目也可以使用RobotGeek Snapper Core Arm Kit來完成,假設(shè)您有自己的微控制器、電源和接線。
按照入門指南和組裝指南構(gòu)建您的機(jī)器人手臂。
第 2 步:固件安裝
Arm Link 庫和固件會(huì)隨RobotGeek 工具和庫文件自動(dòng)安裝,無需單獨(dú)安裝。如果您希望手動(dòng)安裝文件,請(qǐng)下載并解壓縮InterbotiX Arm Link Library & Firmware 文件。打開文件夾ArmLinkLibrary-master 并將文件夾復(fù)制ArmLink 到您的 Arduino Library 文件夾中。
從 Arduino IDE打開固件。ArmLinkSerial
File -> Examples -> Arm Link -> SnapperArmLinkSerial
在將代碼加載到機(jī)器人手臂之前,您需要調(diào)整代碼以匹配您的夾具類型。在 Arduino IDE 中,單擊GlobalArm.h 第 16 行附近的選項(xiàng)卡,您應(yīng)該會(huì)看到以下代碼塊
//#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
//#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
如果您使用的是 RobotGeek Parallel Gripper,請(qǐng)取消注釋第二行。您的代碼應(yīng)如下所示
//#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
如果您使用的是 RobotGeek 9G Gripper,請(qǐng)取消注釋第一行。您的代碼應(yīng)如下所示
#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
//#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
現(xiàn)在已經(jīng)定義了夾具類型,代碼將負(fù)責(zé)正確處理您的夾具類型。如果您在查找這些行時(shí)遇到問題,請(qǐng)單擊Compile Arduino IDE 中的按鈕,它將在您需要更改的行附近顯示錯(cuò)誤。
現(xiàn)在您可以將固件加載到 Geekduino 上。完成后,將 USB 電纜插入計(jì)算機(jī),因?yàn)檫@是軟件與 Arm 通信的方式。
第 3 步:Arm Link 軟件安裝
Arm Link 軟件是用 Java 編寫的。我們建議您為您的操作系統(tǒng)下載帶有嵌入式 java 的版本(有關(guān)更多信息,請(qǐng)參閱下載頁面)。該軟件與 Windows XP、Vista 和 7、Mac OS 10.5+ 和 Linux 兼容。
Mac 用戶請(qǐng)參閱此處的“Mac 用戶注意事項(xiàng)”,然后再閱讀本指南的其余部分。
如果您在運(yùn)行 Arm Link 軟件時(shí)遇到任何問題,我們建議您在處理環(huán)境中運(yùn)行該軟件。這個(gè)過程相對(duì)簡(jiǎn)單,并為您提供了額外的選擇。
第 4 步:使用 Arm Link 軟件
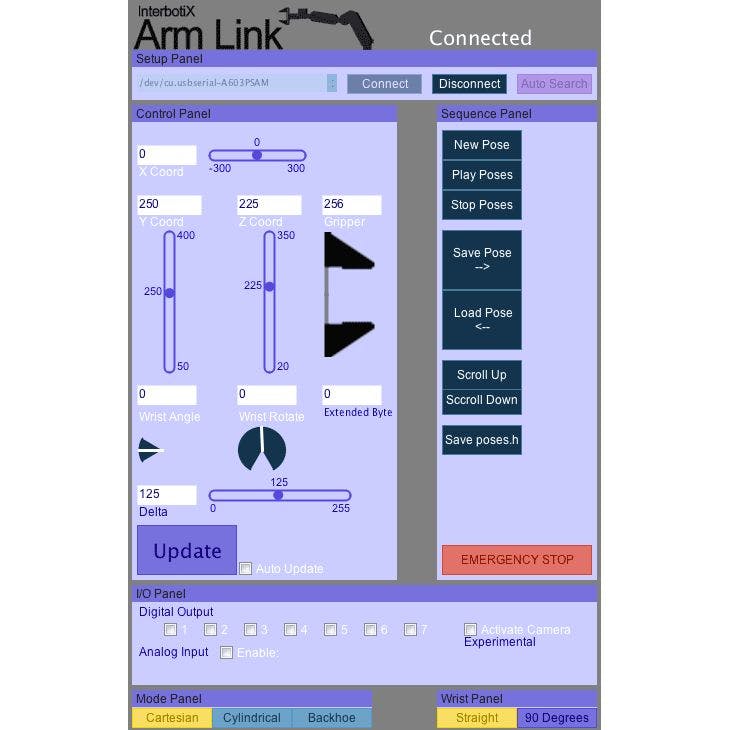
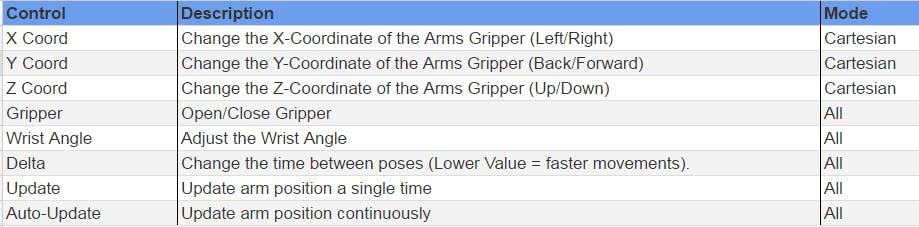
使用自動(dòng)連接按鈕,或選擇一個(gè)串行端口并使用連接按鈕。手臂將從“睡眠”位置移動(dòng)到“家”位置。這可能需要幾秒鐘。一旦手臂移動(dòng)到其原始位置并準(zhǔn)備好接受命令,就會(huì)出現(xiàn)各種面板。您可以調(diào)整滑塊或文本面板來調(diào)整手臂的位置。使用更新按鈕將這些值發(fā)送到手臂。
您可以使用“自動(dòng)更新”復(fù)選框自動(dòng)向機(jī)械臂發(fā)送命令。因?yàn)槊總€(gè)姿勢(shì)都需要在發(fā)送下一個(gè)姿勢(shì)之前完成,所以用戶可能希望降低Delta值以使手臂更具響應(yīng)性。
使用說明
缺少串行端口
在打開程序之前插入您的 FTDI-USB 電纜。Arm Link軟件目前在連接后不會(huì)刷新串口列表,所以程序啟動(dòng)時(shí)串口必須是可用的。如果 Arm Link 中的串行端口不可用,請(qǐng)關(guān)閉并重新打開應(yīng)用程序。插入/拔出
使用網(wǎng)絡(luò)攝像頭
網(wǎng)絡(luò)攝像頭支持目前處于試驗(yàn)階段。我們建議將帶有 250 毫米鵝頸管的 RobotGeek VGA 網(wǎng)絡(luò)攝像頭與Arm Link 軟件一起使用。其他網(wǎng)絡(luò)攝像頭應(yīng)該可以正常工作,但尚未經(jīng)過測(cè)試。該程序?qū)L試連接到可用的第一個(gè)網(wǎng)絡(luò)攝像頭。如果您遇到問題,請(qǐng)嘗試將相機(jī)直接插入您的計(jì)算機(jī)(而不是通過集線器或擴(kuò)展器)。
序列面板
通過模式面板或手腕面板更改模式或手腕方向將刪除序列面板中的所有當(dāng)前姿勢(shì)。該軟件目前不支持混合模式播放。
數(shù)據(jù)包數(shù)據(jù)
如果您想查看您發(fā)送的數(shù)據(jù)包,請(qǐng)參見此處
模擬反饋和自動(dòng)更新
我們不建議同時(shí)使用“自動(dòng)更新”和“模擬輸入”。模擬反饋功能與其他控件的工作方式略有不同。所有其他控件都向機(jī)械臂發(fā)出命令,但模擬反饋功能需要數(shù)據(jù)。為了獲得一段模擬數(shù)據(jù),程序必須發(fā)送一個(gè)命令包,請(qǐng)求特定端口的當(dāng)前模擬值。啟用后,模擬反饋將每 33ms 請(qǐng)求一條新數(shù)據(jù)。開啟自動(dòng)更新后,每 33ms 也會(huì)發(fā)送一個(gè)命令包。當(dāng)這兩者同時(shí)工作時(shí),手臂的響應(yīng)速度可能比正常情況下要慢。
第 5 步:播放序列
設(shè)置好固件和軟件后,在 Arm Link 軟件中連接到機(jī)械臂。單擊序列面板中的“新姿勢(shì)”按鈕以創(chuàng)建新姿勢(shì)。新姿勢(shì)將由姿勢(shì)面板按鈕右側(cè)的編號(hào)面板指示。這個(gè)新創(chuàng)建的姿勢(shì)將包含控制面板當(dāng)前顯示的坐標(biāo),即默認(rèn)姿勢(shì)。
現(xiàn)在使用控制面板選擇手臂移動(dòng)到的新位置。單擊“更新”以確保手臂已移動(dòng)到您想要的位置。隨意將手臂稍微調(diào)整到正確的位置。一旦您對(duì)手臂的位置感到滿意,再次單擊“新姿勢(shì)”按鈕,您將看到創(chuàng)建的另一個(gè)姿勢(shì)。此姿勢(shì)將包含控制面板當(dāng)前顯示的坐標(biāo)。
重復(fù)這個(gè)定位手臂并做出新姿勢(shì)的過程,直到您擁有所需數(shù)量的姿勢(shì)。單擊“播放姿勢(shì)”按鈕以查看所有動(dòng)作中的姿勢(shì)。按“停止姿勢(shì)”停止播放。播放將始終從所選姿勢(shì)開始,除非未選擇任何姿勢(shì),否則將從姿勢(shì) 0 開始播放。
如果您需要調(diào)整姿勢(shì),請(qǐng)先單擊單個(gè)姿勢(shì)以將其選中。該姿勢(shì)應(yīng)擴(kuò)展為大于其他姿勢(shì)以顯示它已被選中。現(xiàn)在單擊“加載姿勢(shì)”將姿勢(shì)加載到控制面板中。您需要單擊“更新”以將手臂物理移動(dòng)到該姿勢(shì)的位置。您現(xiàn)在可以對(duì)控制面板進(jìn)行任何調(diào)整以調(diào)整姿勢(shì)。對(duì)姿勢(shì)感到滿意后,單擊“保存姿勢(shì)”將姿勢(shì)數(shù)據(jù)保存回所選姿勢(shì)。
您可以加載姿勢(shì),然后創(chuàng)建新姿勢(shì)以復(fù)制特定姿勢(shì)。您還可以拖放姿勢(shì)以重新排序。姿勢(shì)將保持其顏色,但會(huì)丟失其特定編號(hào)。
您可以調(diào)整兩個(gè)時(shí)間變量。第一個(gè)是 Delta 值(完成姿勢(shì)所需的時(shí)間)。每次運(yùn)動(dòng)的增量值都是唯一的。較小的 delta 值將產(chǎn)生較快的運(yùn)動(dòng),較大的 delta 將產(chǎn)生較慢的運(yùn)動(dòng)。
第二個(gè)變量是暫停值。該值決定了手臂在姿勢(shì)完成后開始下一個(gè)姿勢(shì)之前等待的時(shí)間。此姿勢(shì)可以設(shè)置為 0,或任何任意值。只需輸入以毫秒為單位的時(shí)間值,每個(gè)姿勢(shì)都會(huì)等待該時(shí)間段。在 Arm Link 軟件中,此值對(duì)所有姿勢(shì)都是全局的,但可以在導(dǎo)出序列后按每個(gè)姿勢(shì)更改它。
一旦您對(duì)您的順序和時(shí)間感到滿意,請(qǐng)按“保存到文件”。這將打開一個(gè)窗口對(duì)話框并要求您選擇一個(gè)文件夾來放置導(dǎo)出的armSequence.h 文件。暫時(shí)將文件放在桌面上。
第 6 步:將序列加載到獨(dú)立固件中
在Snapper Arm 入門指南中,您應(yīng)該已經(jīng)下載了Snapper Arm 演示代碼并將其添加到您的 RobotGeek 草圖文件夾中。該文件包含SnapperArmPlayback 代碼。在 IDE 中打開草圖之前,您需要將armSequence.h 文件復(fù)制到SnapperArmPlayback 文件夾中。假設(shè)您的Arduino 文件夾在您的Documents 文件夾中,您可以在SnapperArmPlayback 此處找到:
Documents -> Arduino -> RobotGeek sketches -> SnapperArm -> SnapperArmPlayback
在此文件夾中,您將找到多個(gè)文件,包括armSequence.h . 該文件的默認(rèn)副本按順序移動(dòng)手臂上的每個(gè)軸。您可以將此文件保存在另一個(gè)文件夾中以供以后使用,也可以將其刪除。現(xiàn)在將armSequence.h 保存到桌面的文件復(fù)制到文件SnapperArmPlayback 夾中。
現(xiàn)在您可以將SnapperArmPlayback 草圖打開到您的 Arduino IDE 中。在 Arduino IDE 中,您可以在以下位置找到草圖:
File -> Sketchbook -> RobotGeek sketches -> Snapper Arm -> SnapperArmPlayback
在將代碼加載到機(jī)器人手臂之前,您需要調(diào)整代碼以匹配您的夾具類型。在 Arduino IDE 中,單擊GlobalArm.h 第 16 行附近的選項(xiàng)卡,您應(yīng)該會(huì)看到以下代碼塊:
//#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
//#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
如果您使用的是 RobotGeek Parallel Gripper,請(qǐng)取消注釋第二行。您的代碼應(yīng)如下所示:
//#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
如果您使用的是 RobotGeek 9G Gripper,請(qǐng)取消注釋第一行。您的代碼應(yīng)如下所示:
#define GRIPPER_TYPE ROBOT_GEEK_9G_GRIPPER
//#define GRIPPER_TYPE ROBOT_GEEK_PARALLEL_GRIPPER
現(xiàn)在已經(jīng)定義了夾具類型,代碼將負(fù)責(zé)正確處理您的夾具類型。如果您在查找這些行時(shí)遇到問題,請(qǐng)單擊Compile Arduino IDE 中的按鈕,它將在您需要更改的行附近顯示錯(cuò)誤。
現(xiàn)在您可以將草圖加載到您的 Geekduino 上。在等待序列開始時(shí),手臂應(yīng)該回到其原始位置。您可以通過按下連接到手臂的按鈕來激活序列,或者打開串行監(jiān)視器(38400 波特)并發(fā)送1 .
您的手臂現(xiàn)在將播放您設(shè)計(jì)的序列。手臂將播放一次序列,然后在最后一個(gè)姿勢(shì)上停止。操作應(yīng)與 Arm Link 軟件中的操作相同。您可以通過按下按鈕/再次輸入串行命令來重新開始姿勢(shì)。
如果您再次按下按鈕,手臂將在完成當(dāng)前姿勢(shì)后停止。如果您通過串行終端發(fā)送“1”,則手臂將完成其整個(gè)序列,然后停止。
第7步:你完成了!現(xiàn)在怎么辦?
現(xiàn)在您已經(jīng)設(shè)置好手臂,熟悉 Arm Link 的工作方式,并且可以記錄和回放姿勢(shì),您能做什么?
我們有一只手臂:
我們很想看到你的機(jī)械臂做一些瘋狂的事情!
第 8 步:高級(jí)用法
最小代碼
該文件夾SnapperArmPlaybackMinimal 包含一個(gè)草圖,其中包含一次播放手臂序列的最少代碼量。如果您希望將 arm 播放代碼集成到現(xiàn)有項(xiàng)目/代碼中,此代碼可能會(huì)為您提供幫助。如果你想將自己的序列添加到這個(gè)文件中,將循環(huán)輸入的內(nèi)容添加do 到armSequence.h 循環(huán)setup 輸入中SnapperArmPlaybackMinimal.ino
IKSequencingControl() 概述
該armSequence.h 文件通過多次調(diào)用該IKSequencingControl() 函數(shù)來工作。此功能使您可以輕松地將手臂移動(dòng)到特定位置。
該IKSequencingControl() 函數(shù)接受參數(shù)。鯛魚臂僅使用其中的 8 個(gè)參數(shù)。“手腕旋轉(zhuǎn)”參數(shù)應(yīng)設(shè)置為“0”值。
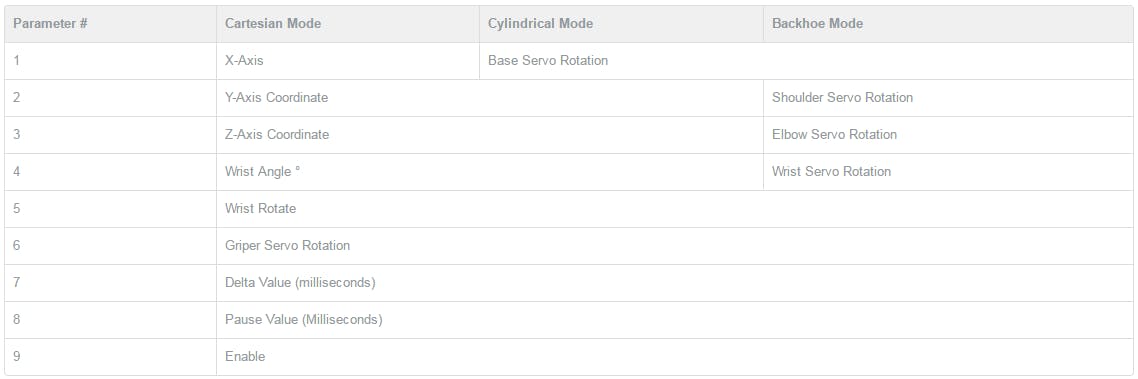
例如,在笛卡爾模式下,以下行將手臂移動(dòng)到 (0,150,150) (X,Y,Z),手腕角度為 0°,并且夾持器關(guān)閉。它將在 2 秒內(nèi)移動(dòng),并在姿勢(shì)完成后等待一秒。
IKSequencingControl(0 , 150 , 150 , 0 , 0 , 0 , 2000 , 1000, 1);
調(diào)整時(shí)機(jī)
您可以通過調(diào)整函數(shù)中的第 7 和第 8 個(gè)參數(shù)來微調(diào)每個(gè)姿勢(shì)IKSequencingControl() 。更改第 7 個(gè)參數(shù),增量值將影響手臂從當(dāng)前位置移動(dòng)到下一個(gè)位置所需的時(shí)間。前面的示例中,手臂移動(dòng)了 2000 毫秒以上。如果您希望手臂移動(dòng)超過 5000 毫秒,請(qǐng)將代碼更改為
IKSequencingControl(0 , 150 , 150 , 0 , 512 , 0 , 5000 , 1000, 1);
更改第 8 個(gè)參數(shù),暫停值將影響姿勢(shì)完成后手臂等待的時(shí)間。前面的示例讓手臂等待 1000 毫秒。如果您希望手臂立即移動(dòng)到下一個(gè)位置,請(qǐng)將代碼更改為
IKSequencingControl(0 , 150 , 150 , 0 , 512 , 0 , 2000 , 0, 1);
手動(dòng)調(diào)整值
使用 Arm Link 軟件是生成手臂值的最佳方式,因?yàn)樗鼤?huì)檢查限制并讓您試用手臂。但是,可以從頭開始手動(dòng)創(chuàng)建自己的姿勢(shì)。請(qǐng)參閱Arm Limits表以查看您可以為每個(gè) arm/參數(shù)使用的值范圍。注意:前面表格中列出的增量值不適用于該IKSequencingControl() 函數(shù)。有關(guān)調(diào)整 delta 值的說明,請(qǐng)參閱上面的“調(diào)整時(shí)序”。
中斷序列
一旦您發(fā)送了手臂移動(dòng)命令并且它開始移動(dòng),則不能中斷單個(gè)姿勢(shì) - 它始終會(huì)完成姿勢(shì)。
代碼可以通過SnapperArmPlayback 按鈕在任何姿勢(shì)后停止序列。這是因?yàn)榘粹o連接到中斷引腳。當(dāng)對(duì)該引腳進(jìn)行更改(例如激活按鈕)時(shí),當(dāng)前運(yùn)行的代碼將暫停并執(zhí)行特殊的中斷代碼。此代碼將playState 變量設(shè)置為0 . 任何進(jìn)一步IKSequencingControl() 的調(diào)用都不會(huì)執(zhí)行手臂運(yùn)動(dòng),因?yàn)榇藛⒂靡殃P(guān)閉。
也可以在IKSequencingControl() 函數(shù)中插入額外的代碼來檢查額外的條件。這將允許您根據(jù)其他條件(如串行事件、模擬數(shù)據(jù)和其他非中斷數(shù)字引腳)中斷序列。
高級(jí)按鈕選項(xiàng)
如果您不使用按鈕(而是依靠串行終端或自動(dòng)序列),則需要將第 41 行從
#define USE_BUTTON true
至
#define USE_BUTTON false
這將禁止代碼嘗試讀取數(shù)字引腳(以及可能的讀取噪音/激活手臂)
如果您使用的是帶跳線的按鈕或任何其他 2 線瞬時(shí)開關(guān),則應(yīng)將第 45 行更改為
#define BUTTON_TRUE LOW
更改此#define 將為您的按鈕設(shè)置邏輯和上拉電阻。
如果您使用的是RobotGeek 按鈕或帶有內(nèi)置下拉電阻的按鈕,您可以保持原樣定義。
#define BUTTON_TRUE HIGH
- 機(jī)械臂:Arduino + Matlab
- PC控制的機(jī)械臂設(shè)計(jì)
- Python控制的機(jī)械臂開源分享
- 人臂控制機(jī)械臂開源
- 使用EMG信號(hào)控制機(jī)械臂
- 工業(yè)機(jī)械臂
- 基于YOLOv3等的機(jī)械臂藥盒智能抓取方法 61次下載
- 基于FuzzyP的多臂機(jī)器人機(jī)械臂控制系統(tǒng) 13次下載
- 基于最小二乘法的起重機(jī)機(jī)械臂關(guān)節(jié)控制系統(tǒng) 12次下載
- 機(jī)械臂手冊(cè)使用說明 17次下載
- 機(jī)械臂電路設(shè)計(jì)開源合集,電機(jī)工程師們的杰作 46次下載
- 如何使用深度強(qiáng)化學(xué)習(xí)進(jìn)行機(jī)械臂視覺抓取控制的優(yōu)化方法概述 22次下載
- DSP的機(jī)械臂預(yù)測(cè)控制 1次下載
- 機(jī)械臂關(guān)節(jié)驅(qū)動(dòng)組件 7次下載
- 基于LeapMotion的機(jī)械臂交互控制研究_康楊雨軒 6次下載
- 初識(shí)IO-Link及IO-Link設(shè)備軟件協(xié)議棧 3154次閱讀
- 基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用 407次閱讀
- 【開源獲獎(jiǎng)案例】四軸機(jī)械臂控制系統(tǒng) 861次閱讀
- 如何使用Python和PinPong庫控制Arduino 718次閱讀
- 基于深度強(qiáng)化學(xué)習(xí)的視覺反饋機(jī)械臂抓取系統(tǒng) 1896次閱讀
- J-Link script的組成與使用方法 2360次閱讀
- 如何從網(wǎng)頁控制arduino? 3836次閱讀
- dfrobotArduino開發(fā)實(shí)戰(zhàn)-遙控機(jī)械臂套裝簡(jiǎn)介 2399次閱讀
- MATLAB機(jī)械臂的兩種路徑規(guī)劃 8995次閱讀
- 為什么最好的機(jī)械臂是7個(gè)自由度而不是6個(gè)自由度 2.6w次閱讀
- 工業(yè)機(jī)器人和機(jī)械手臂有什么區(qū)別 7664次閱讀
- 全球首款輕量級(jí)機(jī)械臂已經(jīng)出現(xiàn)了! 7399次閱讀
- arduino如何控制舵機(jī)及詳細(xì)步驟 16.3w次閱讀
- 工業(yè)機(jī)器人常用材料分析:機(jī)械臂材料與常用傳感器 2.5w次閱讀
- 基于MicroZed的五軸自動(dòng)化機(jī)械臂Dexter 3351次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論