 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
?
比賽包括兩足機器人和四足機器人的 10 米自主沖刺。
我為四足動物收集的當前記錄是 10 米短跑 42 秒。
所以考慮到這一點,我必須想出一個設計一個我認為可以擊敗它的機器人的計劃,以便成為新的衛冕冠軍!!!
從教程成員“jegatheesan.soundarapandian”和去年圖盧茲機器人競賽“Oracid 1”的獲勝者那里尋求靈感,他們似乎都喜歡設計和分享有關如何構建四足動物的教程。我開始基本上復制那里的設計并使其更大一點!
該設計基于每條腿的五連桿機構 2 個伺服器為每條腿提供動力,總共 8 個伺服器。
規則規定,除了開始信號之外,整個比賽必須由機器人自主進行,所以我必須想出一個輕量級的系統來讓機器人保持在軌道上,在這種情況下,我使用了 QMC5883L 磁力計(數字羅盤)所以它可以保持正確的方向,一個 HC-SR04 超聲波傳感器,以防機器人真的搞砸并開始以 90 度角撞到墻上,我只是在代碼中使用了一個計步器來告訴它應該走多少步10米。
如果您對構建這個機器人感興趣,請不要擔心這只猴子已經考慮好了一切!
100% 支持免費 3D 打印主體:
除了電子設備和連接電子設備的螺絲外,所有東西都是 3D 可打印的,唯一使用的是相同的小十字頭螺絲,您只需要一個小十字頭螺絲刀來組裝機器人
簡單的即插即用電子產品:
無需復雜的焊接
合理的打印時間:
他可能看起來很大而且很有氣勢,但他只有 15 小時的印刷品(對某些人來說時間很長:D)
合理的構建量要求:
他可以在相對較小的打印機上打印,打印體積僅為 L:150cm x W:150cm x H:25cm
機器人總成本:
僅機器人一個成本就在 75 美元左右來制造包括在內的充電器。
如果您想要與我相同的設置,則需要3D 打印控制器(可選)。
警告:
我使用的 5V 3A 電源不是最好的解決方案,因為這個機器人要行走所有 8 個舵機必須同時運行,因此它們會消耗很多電流,不用擔心我沒有讓機器人著火或發生任何事情但預計功率晶體管會發熱很多,我不建議一次使用機器人超過 2 分鐘,讓它在兩次運行之間冷卻,以避免對伺服護罩造成任何不必要的損壞。
如果你們中的任何人對此問題有解決方案,您的意見將不勝感激!
補給品:
機器人用品:
- 8x Tower Pro MG90S 模擬 180 度伺服(Aliexpress/亞馬遜)
- 1x Sunfounder 無線伺服控制板(Sunfounder Store/RobotShop)
- 1x Arduino NANO(速賣通/亞馬遜)
- 1x NRF24L01 收發器模塊(如果您不使用控制器,則不需要此)(Aliexpress/Amazon)
- 1x 磁力計(數字羅盤)QMC5883L GY-273(Aliexpress/亞馬遜)
- 1x 超聲波傳感器 HC-SR04(Aliexpress/亞馬遜)
- 2x 18650 3.7V 鋰離子電池(Aliexpress/亞馬遜)
- 1x 18650 雙電池座,帶開關(Aliexpress/亞馬遜)
- 1x 18650 鋰離子電池充電器(Aliexpress/亞馬遜)
- 4x 母對母杜邦跨接電纜 10 厘米長(Aliexpress/亞馬遜)
- 4x 母對母杜邦跨接電纜 20 厘米長(Aliexpress/亞馬遜)
- 10x 螺絲 2 毫米 x 8 毫米(與一包伺服系統中的螺絲相同)(Aliexpress/亞馬遜)
控制器:
要手動控制這個機器人,您需要 3D 打印的 Arduino 控制器(鏈接在這里)
機器人也可以是完全自主的,因此控制器不是強制性的。
塑料:
零件可以用 PLA 或 PETG 或 ABS 打印。
!!請注意 500 克線軸足以打印 1 個機器人!
3D打印機:
所需的最小構建平臺:L150mm x W150mm x H25mm
任何 3d 打印機都可以。我親自在 Creality Ender 3 上打印了這些部件,這是一款價格低于 200 美元的低成本 3D 打印機。打印出來的效果很完美。
第 1 步:3D 打印零件
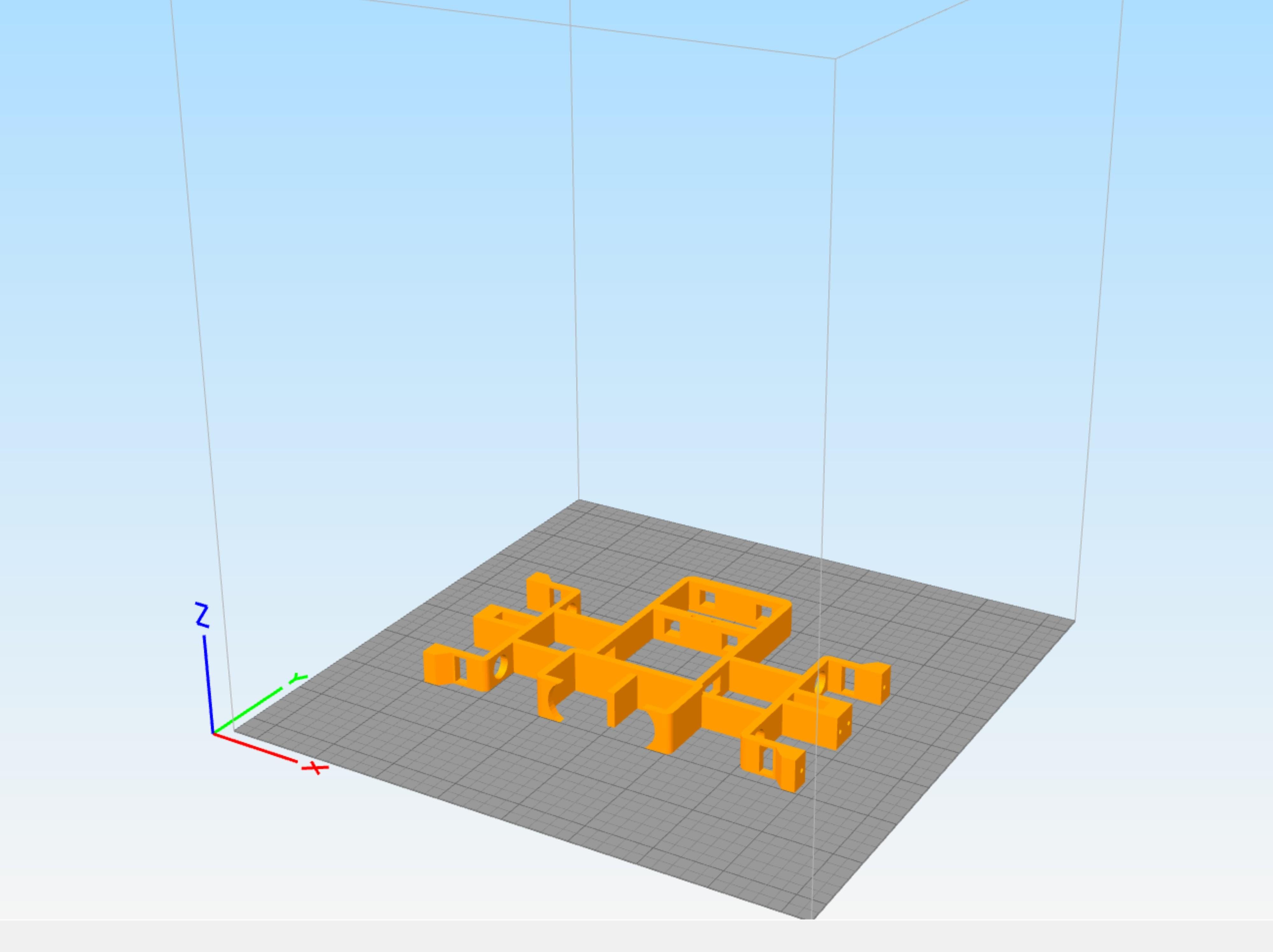
。
- 將圓形銷 L1 放入 BASE FRONT 前左舵機支架的孔中
- 將其中一個 MG90S 舵機的電纜穿過 BASE FRONT 左前舵機支架中的插槽
- 將 MG90S 伺服插入到位
- 用 2 個螺絲將 MG90S 伺服固定到位(不要過度擰緊,因為這可能會損壞底座)
- 對 BASE FRONT 左后、右前和右后伺服支架重復相同的過程
- 對 BASE BACK 左前、左后、右前和右后伺服支架重復相同的過程
- 使用 2 個對角螺釘或 4 個螺釘將電池座固定到 BASE ELECTRONICS
- 用 2 個斜對角螺釘或 4 個螺釘將無線伺服控制板固定到 BASE ELECTRONICS
- 將 Arduino nano 和 NRF24L01 收發器夾到無線伺服控制板
- 通過 2 個朝后的方孔 USB 端口將 BASE FRONT 滑到 BASE ELECTRONICS 上
- 用 2 個方形夾固定到位
- 通過 2 個朝后的方孔 USB 端口將 BASE BACK 滑到 BASE ELECTRONICS 上
- 用 2 個方形夾固定到位
- 用 2 顆螺絲將磁力計固定到底座前部
- 將超聲波傳感器夾在 BASE FRONT 上
- 如圖所示,將伺服電纜引導至無線伺服控制板
第 3 步:插入電子設備
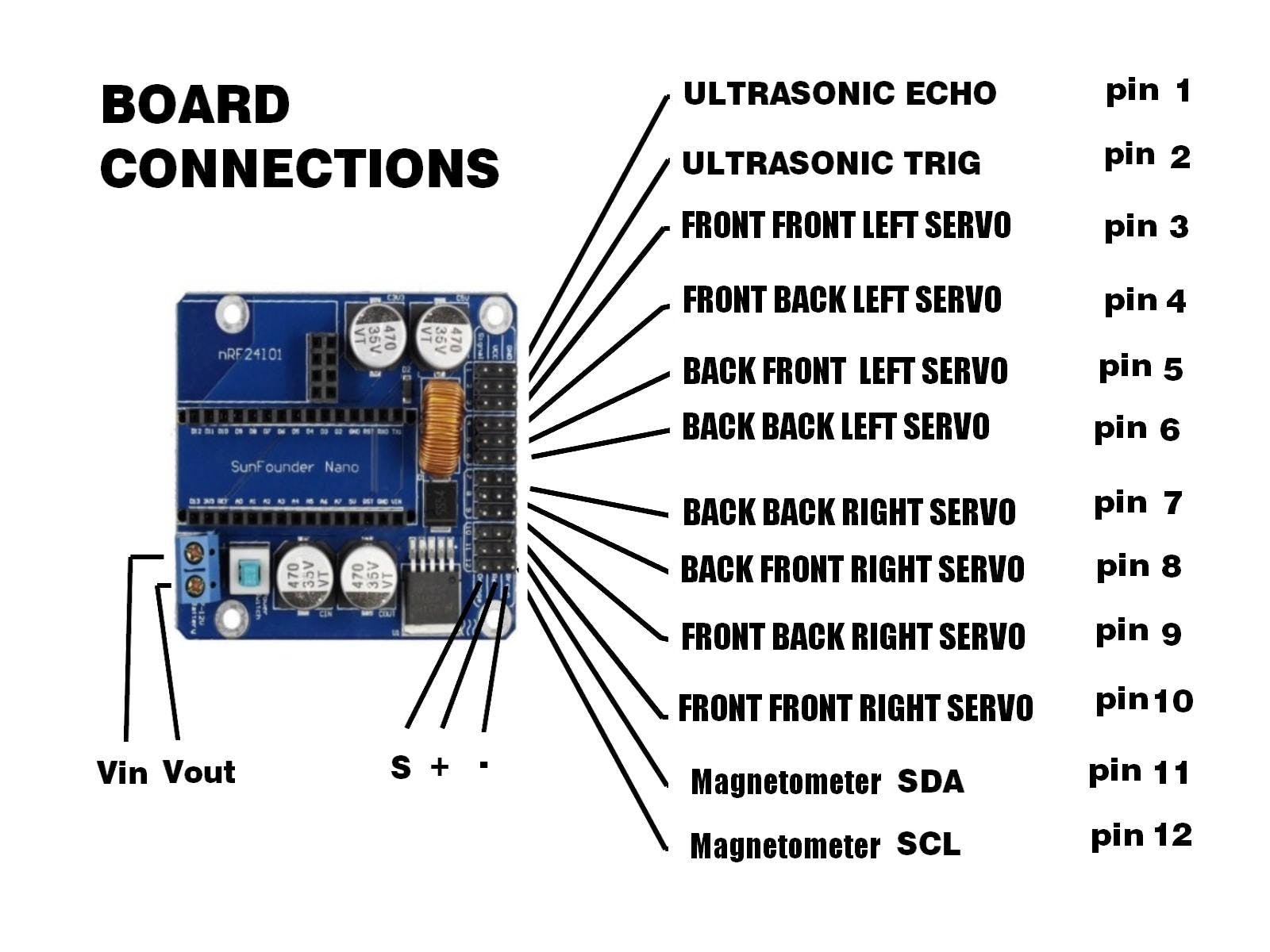
。
- 將 1 英尺滑過 1 個圓形銷 L4
- 將 1 CALF EXT 的較厚端滑過 CIRCULAR PIN L4,伸出的一側背對腳
- 在圓形銷 L4 上滑動 2 CALF INT
- 將 1 CALF EXT 的較厚端滑過 CIRCULAR PIN L4,伸出的一側朝向腳
- 在圓形銷 L4 上滑動 1 英尺
- 用 3 個圓形夾子固定到位
- 將 1 個圓形銷 L3 滑過組裝好的 CALF EXT 的 1
- 將 1 個 THIGH SERVO 滑到 CIRCULAR PIN L3 上,伸出側朝向 CALF EXT
- 在圓形銷 L3 上滑動 1 大腿
- 將 CIRCULAR PIN L3 滑過另一個組裝好的 CALF EXT
- 用 3 個圓形夾子固定到位
- 將 1 個 THIGH SERVO 滑到 1 個圓形銷 L2 上,伸出側朝向圓形銷 L2 的頭部
- 將圓形銷 L2 滑過兩個組裝好的 CALF INTS
- 滑動 1 大腿穿過圓形銷 L2
- 用 3 個圓形夾子固定到位
- 對剩下的 3 條裸腿重復所有過程,記住當腿組裝到機器人上時,銷頭朝外,CALF EXTS 位于 CALF INTS 前面,因此組裝前后相同,但從左到右對稱.
第 5 步:安裝 Arduino
GorillaBot 使用 C++ 編程來運行。為了將程序上傳到 GorillaBot,我們將使用 Arduino IDE 以及其他一些需要安裝在 Arduino IDE 中的庫。
- 在您的計算機上安裝 Arduino IDE:Arduino IDE (鏈接在這里)
為了將庫安裝到 Arduino IDE,您必須對以下鏈接中的所有庫執行以下操作
- 單擊下面的鏈接(這將帶您到庫 GitHub 頁面)
- 單擊顯示代碼的綠色按鈕
- 單擊下載 ZIP(下載應在您的網絡瀏覽器中開始)
- 打開下載的庫文件夾
- 解壓下載的庫文件夾
- 復制解壓后的庫文件夾
- 將解壓后的庫文件夾粘貼到 Arduino 庫文件夾(C:\Documents\Arduino\libraries)
圖書館:
我們已經準備好了,你應該準備好了為了確保你已經正確設置了 Arduino IDE,請按照以下步驟操作
- 在下面下載所需的 Arduino 代碼(GorillaBot Controller & Autonomous.ino)
- 在 Arduino IDE 中打開它
- 選擇工具:
- 選擇板:
- 選擇 Arduino Nano
- 選擇工具:
- 選擇處理器:
- 根據您購買的 Arduino nano 選擇 ATmega328p 或 ATmega328p(舊引導加載程序)
- 點擊Arduino IDE左上角的Verify按鈕(Tick按鈕)
如果一切順利,您應該在底部收到一條消息,顯示完成編譯。
第 6 步:上傳代碼
現在是時候將代碼上傳到 GorillaBot 的大腦 Arduino Nano。
- 通過 USB 電纜將 Arduino Nano 插入您的計算機
- 單擊上傳按鈕(右箭頭按鈕)
如果一切順利,您應該會在底部收到一條消息,上面寫著完成上傳。
第 7 步:校準舵機
為了正確組裝腿,我們必須將伺服系統歸位到其原始位置。
- 將 2 節鋰離子電池插入電池座
- 打開機器人并等待 5 秒鐘,讓伺服系統到達其原始位置
- 關閉機器人
第 8 步:將腿組裝到身體上
將腿連接到伺服系統非常簡單,只需記住在裝配針頭朝外時,CALF EXT 將放置在 CALF INT 的前面。
- 將其中一條腿的 CALF EXT 側的 THIGH 滑到前左舵機支架上的 CIRCULAR PIN L1 上
- 用 1 個圓形夾固定到位
- 將同一條腿的 CALF EXT 側的 THIGH SERVO 滑到前左前伺服支架上的伺服頭上(確保 THIGH SERVO 與身體成 90 度角)
- 使用單臂伺服喇叭和小伺服螺釘將 THIGH SERVO 固定在與車身成 90 度角的位置
- 對該腿的剩余 THIGH 和 THIGH SERVO 對前后左伺服支架重復相同的過程
- 對剩余的 3 條腿重復所有先前的過程
第 9 步:準備比賽!!!
所以就是這樣,你應該準備好了!!!
手動模式:
- 打開機器人和控制器,使用操縱桿的上下左右方向檢查機器人是否正常行走。
- 按下向下按鈕,機器人應該會跳一段小舞
如果一切正常,伺服系統已經校準好,您現在可以嘗試自主模式。
自主模式
自主沖刺模式使用磁力計保持機器人以恒定方向運行 2.5 米。您可以使用控制器編程所需的位置和所需的校正角度
- 打開機器人和控制器
- 向各個方向移動機器人以校準磁力計 5 秒
- 將機器人放在地面上您希望他進入的位置
- 按向上按鈕以記住該標題
- 將機器人向所需航向左側旋轉 30-45 度
- 按左鍵記住那個位置
- 將機器人轉向所需航向右側 30-45 度
- 按下右側按鈕以記住該位置
- 將機器人放回其所需的航向
- 按下操縱桿按鈕啟動機器人
機器人會以恒定的方向跑 2.5 米,然后停下來,跳起勝利之舞。
我的機器人在 7.5 秒內跑完 2.5 米。
這給了我 30 秒內 10 米的理論時間,希望這足以讓我在圖盧茲機器人比賽中玩得開心
祝我好運,對于那些決定建造這個機器人的人,我很想聽聽你的反饋和你認為可以做出的潛在改進!!!
- YolkaBot機器人開源分享
- 檢測機器人開源分享
- Arduino機器人開源
- 坦克機器人開源分享
- 掃地機器人開源資料 43次下載
- 機器人守衛開源分享
- 伺服機器人開源分享
- 堆肥機器人開源分享
- 英雄機器人開源
- 機器人開源案例
- Arduino機器人開源分享
- 助理機器人開源分享
- 機器人開源項目
- 基于DSP和PC的農業機器人控制系統 17次下載
- 開架式通用水下機器人開源搭建手冊.pdf 11次下載
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 843次閱讀
- 鑄造機器人是什么?選擇工業機器人應該考慮的方向 1137次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- 工業機器人技術應用 5176次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3270次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論