 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
CAN總線與一般的串行通信總線相比,它的數(shù)據(jù)通信具有可靠性高,實時性高,靈活性強等優(yōu)點,不僅廣泛應(yīng)用于汽車行業(yè),而且擴展到了機械工業(yè)、機器人、數(shù)控機床等諸多領(lǐng)域。尤其在大量數(shù)據(jù)通信處理中,高可靠性及實時響應(yīng)的場合,單通道CAN總線不能滿足實際通信的要求。為此,介紹一種基于多通道實時CAN模擬器的設(shè)計方案。
1 CAN總線技術(shù)介紹
1.1 CAN總線特性
CAN(Controller Area Network)總線是一種串行多主站控制器局域網(wǎng)總線。它具有很高的網(wǎng)絡(luò)安全性、通信可靠性和實時性,并且簡單實用,網(wǎng)絡(luò)成本低。它主要用于各種過程監(jiān)測及控制的一種網(wǎng)絡(luò)。CAN最初是由德國BOSCH公司為汽車的監(jiān)測、控制系統(tǒng)而設(shè)計的。由于CAN總線具有卓越的特性和極高的可靠性,特別適合于工業(yè)過程中監(jiān)控設(shè)備的互連,具體來說,CAN具有如下特性:
(1)CAN可以多主方式工作,網(wǎng)絡(luò)上任意一個節(jié)點均可以在任意時刻主動地向網(wǎng)絡(luò)上的其他節(jié)點發(fā)送信息,而不分主從,通信方式靈活;
(2)CAN可以點對點、點對多點(成組)及全局廣播方式傳送接收數(shù)據(jù);
(3)CAN網(wǎng)絡(luò)上的節(jié)點信息可分成不同的優(yōu)先級,可以滿足不同的實時要求;
(4)CAN采用非破壞性總線仲載技術(shù)。當兩個節(jié)點是向網(wǎng)絡(luò)上發(fā)送數(shù)據(jù)時,優(yōu)先級低的節(jié)點主動停止數(shù)據(jù)發(fā)送,而優(yōu)先級高的節(jié)點可以不受影響地繼續(xù)傳輸數(shù)據(jù),大大節(jié)省了總線仲載沖突時間,在網(wǎng)絡(luò)負載很重的情況下也不會出現(xiàn)網(wǎng)絡(luò)癱瘓;
(5)CAN的直接通信距離最大可達10 km(速率小于5 Kb/s),最高通信速率可達1 Mb/s。
1.2 CAN通信協(xié)議
在CAN 2.0B的版本協(xié)議中有兩種不同的幀格式,不同之處為標識符域的長度不同,含有11位標識符的幀稱為標準幀,而含有29位標識符的幀稱為擴展幀。擴展格式是CAN 2.0B協(xié)議新增加的特性。在報文傳輸時,不同的幀具有不同的傳輸結(jié)構(gòu),只有嚴格按照該結(jié)構(gòu)進行幀的傳輸,才能被節(jié)點正確接收和發(fā)送。下面將分別介紹四種傳輸幀的結(jié)構(gòu):
(1)數(shù)據(jù)幀(Data):數(shù)據(jù)幀將數(shù)據(jù)從發(fā)送器傳輸?shù)?a target='_blank' class='arckwlink_none'>接收器。CAN協(xié)議有兩種數(shù)據(jù)幀類型標準2.0A和標準2.0B。兩者本質(zhì)的不同在于ID的長度不同。在2.0A類型中,ID的長度為11位;在2.0B類型中,ID的長度為29位。它由7個域組成:幀起始、仲裁域、控制域、數(shù)據(jù)域、CRC校驗碼域、應(yīng)答域、幀結(jié)束。
(2)遠程幀(Remote):總線單元發(fā)出遠程幀,請求發(fā)送具有同一標識符的數(shù)據(jù)幀。接收數(shù)據(jù)的節(jié)點可通過發(fā)遠程幀請求源節(jié)點發(fā)送數(shù)據(jù)。它由6個域組成:幀起始、仲裁域、控制域、校驗域、應(yīng)答域、幀結(jié)束。
(3)錯誤幀(Error):任何單元檢測到總線錯誤就發(fā)出錯誤幀。由錯誤標志和錯誤分界兩個域組成。接收節(jié)點發(fā)現(xiàn)總線上的報文有誤時,將自動發(fā)出“活動錯誤標志”,其他節(jié)點檢測到活動錯誤標志后發(fā)送“錯誤認可標志”。
(4)過載幀(Overload):過載幀用在相鄰數(shù)據(jù)幀或遠程幀之間提供附加的延時。由超載標志和超載分隔符組成。超載幀只能在一個幀結(jié)束后開始。當接收方在接收下一幀之前,需要過多的時間處理當前的數(shù)據(jù),或在幀間空隙域檢測到顯性電平時,則導(dǎo)致發(fā)送超載幀。
1.3 CAN協(xié)議控制器
目前主流的CAN協(xié)議控制器一般采用I/O總線(SJA1000等)或SPI接口(M(2P2515等)與處理器進行通信。該設(shè)計采用SJA1000控制器。
SJA1000是一款獨立CAN控制器,應(yīng)用于移動目標和工業(yè)局域網(wǎng)控制領(lǐng)域。SJA1000具有兩種工作模式:BasicCAN和PeliCAN。該設(shè)計采用PeliCAN工作模式。SJA1000用來完成CAN協(xié)議所規(guī)定的物理層和數(shù)據(jù)鏈路層的所有功能,它可以支持多種處理器的時序特性,如Intel模式或Motorola模式,與微處理器的接口非常簡單,微處理器以訪問外部存儲器的方式來訪問SJA1000。
SJA1000通過CAN控制器接口即PCA82C250芯片接到CAN總線上。CAN收發(fā)器使用飛利浦公司的PCA82C250,它是連接CAN控制器和物理總線之間的接口,提供了對總線的差動發(fā)動和接收能力,與ISO11898標準完全兼容,有三種不同的工作方式即高速、斜率控制和待機,可根據(jù)實際情況選擇。硬件電路中使用PCA82C250是為了增加通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低干擾等。
2 系統(tǒng)設(shè)計
2.1 系統(tǒng)方案設(shè)計
根據(jù)通用計算機的總線分類,可采用基于ISA總線對多通道實時CAN總線模擬器進行研制,根據(jù)CAN總線通信原理可以提出以下兩種設(shè)計方案:
(1)ISA總線+CAN通信控制器;
(2)ISA總線+微處理器+CAN通信控制器。這兩種設(shè)計方案的不同點在于是否采用處理器來加強控制。
由于CAN總線通信要求實時性高,再加上多通道的設(shè)計滿足實際的需要,故采用單片機來負責CAN總線的通信功能。在這里主要介紹單片機與CAN控制器之間的設(shè)計部分,其系統(tǒng)設(shè)計框圖如圖1所示。
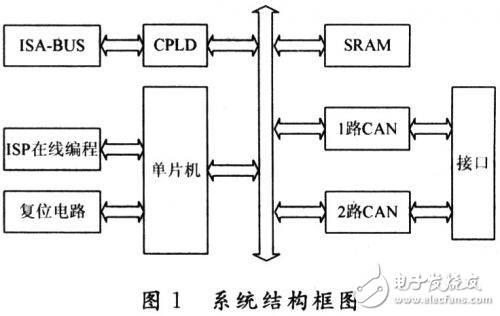
單片機選用DALLAS公司的DS89C430,它是當前8051兼容微控制器中性能最高的。具有重新設(shè)計的處理器內(nèi)核,在相同的晶振頻率下,執(zhí)行指令的速度是最初8051微處理器的12倍。特性:高速8051架構(gòu),每個機器周期一個時鐘;片內(nèi)存儲器16 KB/32 KB/64 KB閃存,在應(yīng)用可編程,通過串口實現(xiàn)在系統(tǒng)可編程;與8051引腳和指令集兼容;四路雙向、8位I/O端口;三個16位定時器/計數(shù)器;256 B暫存RAM等特點。可根據(jù)實際應(yīng)用的需要選擇其部分功能。隨著可編程邏輯器件的飛速發(fā)展,其應(yīng)用領(lǐng)域不斷擴大,可用于譯碼、解碼等方面,使用CPLD可以提高系統(tǒng)集成度,降低噪聲,增強系統(tǒng)可靠性。因此,單片機與CAN控制器之間的鎖存、譯碼采用Xilinx公司XC95144CPLD芯片,優(yōu)化了系統(tǒng)資源,降低了其功耗。
1 CAN總線技術(shù)介紹
1.1 CAN總線特性
CAN(Controller Area Network)總線是一種串行多主站控制器局域網(wǎng)總線。它具有很高的網(wǎng)絡(luò)安全性、通信可靠性和實時性,并且簡單實用,網(wǎng)絡(luò)成本低。它主要用于各種過程監(jiān)測及控制的一種網(wǎng)絡(luò)。CAN最初是由德國BOSCH公司為汽車的監(jiān)測、控制系統(tǒng)而設(shè)計的。由于CAN總線具有卓越的特性和極高的可靠性,特別適合于工業(yè)過程中監(jiān)控設(shè)備的互連,具體來說,CAN具有如下特性:
(1)CAN可以多主方式工作,網(wǎng)絡(luò)上任意一個節(jié)點均可以在任意時刻主動地向網(wǎng)絡(luò)上的其他節(jié)點發(fā)送信息,而不分主從,通信方式靈活;
(2)CAN可以點對點、點對多點(成組)及全局廣播方式傳送接收數(shù)據(jù);
(3)CAN網(wǎng)絡(luò)上的節(jié)點信息可分成不同的優(yōu)先級,可以滿足不同的實時要求;
(4)CAN采用非破壞性總線仲載技術(shù)。當兩個節(jié)點是向網(wǎng)絡(luò)上發(fā)送數(shù)據(jù)時,優(yōu)先級低的節(jié)點主動停止數(shù)據(jù)發(fā)送,而優(yōu)先級高的節(jié)點可以不受影響地繼續(xù)傳輸數(shù)據(jù),大大節(jié)省了總線仲載沖突時間,在網(wǎng)絡(luò)負載很重的情況下也不會出現(xiàn)網(wǎng)絡(luò)癱瘓;
(5)CAN的直接通信距離最大可達10 km(速率小于5 Kb/s),最高通信速率可達1 Mb/s。
1.2 CAN通信協(xié)議
在CAN 2.0B的版本協(xié)議中有兩種不同的幀格式,不同之處為標識符域的長度不同,含有11位標識符的幀稱為標準幀,而含有29位標識符的幀稱為擴展幀。擴展格式是CAN 2.0B協(xié)議新增加的特性。在報文傳輸時,不同的幀具有不同的傳輸結(jié)構(gòu),只有嚴格按照該結(jié)構(gòu)進行幀的傳輸,才能被節(jié)點正確接收和發(fā)送。下面將分別介紹四種傳輸幀的結(jié)構(gòu):
(1)數(shù)據(jù)幀(Data):數(shù)據(jù)幀將數(shù)據(jù)從發(fā)送器傳輸?shù)?a target='_blank' class='arckwlink_none'>接收器。CAN協(xié)議有兩種數(shù)據(jù)幀類型標準2.0A和標準2.0B。兩者本質(zhì)的不同在于ID的長度不同。在2.0A類型中,ID的長度為11位;在2.0B類型中,ID的長度為29位。它由7個域組成:幀起始、仲裁域、控制域、數(shù)據(jù)域、CRC校驗碼域、應(yīng)答域、幀結(jié)束。
(2)遠程幀(Remote):總線單元發(fā)出遠程幀,請求發(fā)送具有同一標識符的數(shù)據(jù)幀。接收數(shù)據(jù)的節(jié)點可通過發(fā)遠程幀請求源節(jié)點發(fā)送數(shù)據(jù)。它由6個域組成:幀起始、仲裁域、控制域、校驗域、應(yīng)答域、幀結(jié)束。
(3)錯誤幀(Error):任何單元檢測到總線錯誤就發(fā)出錯誤幀。由錯誤標志和錯誤分界兩個域組成。接收節(jié)點發(fā)現(xiàn)總線上的報文有誤時,將自動發(fā)出“活動錯誤標志”,其他節(jié)點檢測到活動錯誤標志后發(fā)送“錯誤認可標志”。
(4)過載幀(Overload):過載幀用在相鄰數(shù)據(jù)幀或遠程幀之間提供附加的延時。由超載標志和超載分隔符組成。超載幀只能在一個幀結(jié)束后開始。當接收方在接收下一幀之前,需要過多的時間處理當前的數(shù)據(jù),或在幀間空隙域檢測到顯性電平時,則導(dǎo)致發(fā)送超載幀。
1.3 CAN協(xié)議控制器
目前主流的CAN協(xié)議控制器一般采用I/O總線(SJA1000等)或SPI接口(M(2P2515等)與處理器進行通信。該設(shè)計采用SJA1000控制器。
SJA1000是一款獨立CAN控制器,應(yīng)用于移動目標和工業(yè)局域網(wǎng)控制領(lǐng)域。SJA1000具有兩種工作模式:BasicCAN和PeliCAN。該設(shè)計采用PeliCAN工作模式。SJA1000用來完成CAN協(xié)議所規(guī)定的物理層和數(shù)據(jù)鏈路層的所有功能,它可以支持多種處理器的時序特性,如Intel模式或Motorola模式,與微處理器的接口非常簡單,微處理器以訪問外部存儲器的方式來訪問SJA1000。
SJA1000通過CAN控制器接口即PCA82C250芯片接到CAN總線上。CAN收發(fā)器使用飛利浦公司的PCA82C250,它是連接CAN控制器和物理總線之間的接口,提供了對總線的差動發(fā)動和接收能力,與ISO11898標準完全兼容,有三種不同的工作方式即高速、斜率控制和待機,可根據(jù)實際情況選擇。硬件電路中使用PCA82C250是為了增加通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低干擾等。
2 系統(tǒng)設(shè)計
2.1 系統(tǒng)方案設(shè)計
根據(jù)通用計算機的總線分類,可采用基于ISA總線對多通道實時CAN總線模擬器進行研制,根據(jù)CAN總線通信原理可以提出以下兩種設(shè)計方案:
(1)ISA總線+CAN通信控制器;
(2)ISA總線+微處理器+CAN通信控制器。這兩種設(shè)計方案的不同點在于是否采用處理器來加強控制。
由于CAN總線通信要求實時性高,再加上多通道的設(shè)計滿足實際的需要,故采用單片機來負責CAN總線的通信功能。在這里主要介紹單片機與CAN控制器之間的設(shè)計部分,其系統(tǒng)設(shè)計框圖如圖1所示。
單片機選用DALLAS公司的DS89C430,它是當前8051兼容微控制器中性能最高的。具有重新設(shè)計的處理器內(nèi)核,在相同的晶振頻率下,執(zhí)行指令的速度是最初8051微處理器的12倍。特性:高速8051架構(gòu),每個機器周期一個時鐘;片內(nèi)存儲器16 KB/32 KB/64 KB閃存,在應(yīng)用可編程,通過串口實現(xiàn)在系統(tǒng)可編程;與8051引腳和指令集兼容;四路雙向、8位I/O端口;三個16位定時器/計數(shù)器;256 B暫存RAM等特點。可根據(jù)實際應(yīng)用的需要選擇其部分功能。隨著可編程邏輯器件的飛速發(fā)展,其應(yīng)用領(lǐng)域不斷擴大,可用于譯碼、解碼等方面,使用CPLD可以提高系統(tǒng)集成度,降低噪聲,增強系統(tǒng)可靠性。因此,單片機與CAN控制器之間的鎖存、譯碼采用Xilinx公司XC95144CPLD芯片,優(yōu)化了系統(tǒng)資源,降低了其功耗。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于X86平臺的ARM指令集模擬器的設(shè)計方案
- CAN總線接口EMC標準電路設(shè)計方案 206次下載
- 基于MAX10的多通道小型記錄儀設(shè)計方案 18次下載
- 基于DSP的電磁脈沖模擬器控制系統(tǒng)設(shè)計方案 13次下載
- CAN總線的雙絞線及光纖傳輸 33次下載
- 如何使用MATLAB RTW和Vxworks實現(xiàn)飛行模擬器的實時仿真 6次下載
- 基于FPGA的CAN總線控制器SJA1000軟核的設(shè)計方案解析 30次下載
- 基于CAN總線的分布式飛機客艙模擬器控制系統(tǒng)_郭潔 1次下載
- 基于FPGA的多協(xié)議隔離總線信號模擬器設(shè)計 0次下載
- 基于PC104總線的車載深度模擬器設(shè)計 30次下載
- 基于ARM9的USB與多通道CAN轉(zhuǎn)換器的設(shè)計
- 多星模擬器電路系統(tǒng)的設(shè)計 0次下載
- 新型雷達信號模擬器設(shè)計方案
- 基于PC 機的多通道實時數(shù)據(jù)采集系統(tǒng)的設(shè)計
- 汽車駕駛模擬器新一代實時場景系統(tǒng)的開發(fā)
- 基于FPGA的CAN總線控制器的設(shè)計 1140次閱讀
- CAN總線協(xié)議和ICSim模擬器的使用 5498次閱讀
- 基于DS89C430單片機和XC95144CPLD芯片實現(xiàn)多通道CAN模擬器的設(shè)計 2516次閱讀
- 基于CAN總線技術(shù)實現(xiàn)多視覺傳感器控制方法和系統(tǒng)設(shè)計 1722次閱讀
- 基于FPGA的車電總線通信設(shè)計方案 1162次閱讀
- 基于FPGA的VME總線和CAN總線之間的傳輸轉(zhuǎn)換方案設(shè)計 3596次閱讀
- CAN總線概述及應(yīng)用_CAN總線的應(yīng)用案例(汽車CAN總線應(yīng)用) 3.4w次閱讀
- 什么是can總線?can總線是數(shù)字信號還是模擬信號 7.8w次閱讀
- 一種基于FPGA嵌入式系統(tǒng)的雷達信號模擬器的實現(xiàn) 2601次閱讀
- 基于FPGA的飛行模擬器通信接口設(shè)計 2599次閱讀
- 一種CAN總線與以太網(wǎng)互連系統(tǒng)的設(shè)計方案 4219次閱讀
- 基于協(xié)議的提高RS 485總線實時性的設(shè)計方案 2188次閱讀
- 基于ISA總線多通道控制電路的設(shè)計 5664次閱讀
- 基于LPC2294的CAN總線智能節(jié)點設(shè)計 3783次閱讀
- 基于CAN總線的多ECU通信平臺設(shè)計 1731次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1HFSS電磁仿真設(shè)計應(yīng)用詳解PDF電子教程免費下載
- 24.30 MB | 128次下載 | 1 積分
- 2雷達的基本分類方法
- 1.25 MB | 4次下載 | 4 積分
- 3電感技術(shù)講解
- 827.73 KB | 2次下載 | 免費
- 4從 MSP430? MCU 到 MSPM0 MCU 的遷移指南
- 1.17MB | 2次下載 | 免費
- 5有源低通濾波器設(shè)計應(yīng)用說明
- 1.12MB | 2次下載 | 免費
- 6RA-Eco-RA2E1-48PIN-V1.0開發(fā)板資料
- 35.59 MB | 2次下載 | 免費
- 7面向熱插拔應(yīng)用的 I2C 解決方案
- 685.57KB | 1次下載 | 免費
- 8愛普生有源晶體振蕩器SG3225EEN應(yīng)用于儲能NPC、新能源
- 317.46 KB | 1次下載 | 免費
本月
- 12024年工控與通信行業(yè)上游發(fā)展趨勢和熱點解讀
- 2.61 MB | 763次下載 | 免費
- 2HFSS電磁仿真設(shè)計應(yīng)用詳解PDF電子教程免費下載
- 24.30 MB | 128次下載 | 1 積分
- 3繼電保護原理
- 2.80 MB | 36次下載 | 免費
- 4正激、反激、推挽、全橋、半橋區(qū)別和特點
- 0.91 MB | 32次下載 | 1 積分
- 5labview實現(xiàn)DBC在界面加載配置
- 0.57 MB | 21次下載 | 5 積分
- 6在設(shè)計中使用MOSFET瞬態(tài)熱阻抗曲線
- 1.57MB | 15次下載 | 免費
- 7GBT 4706.1-2024家用和類似用途電器的安全第1部分:通用要求
- 7.43 MB | 14次下載 | 免費
- 8AD18學(xué)習(xí)筆記
- 14.47 MB | 8次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935113次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191360次下載 | 10 積分
- 5十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183329次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81578次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73804次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65985次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論