完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 機械臂
機械臂是指高精度,多輸入多輸出、高度非線性、強耦合的復雜系統。因其獨特的操作靈活性,已在工業裝配、安全防爆等領域得到廣泛應用。
文章:344個 瀏覽:24588次 帖子:48個
base_link的定義 base_link是所有的其他關節的基礎,也就是基坐標系所在的link。 這里他的幾何圖形我們直接引用他的dae文件,至于如何...
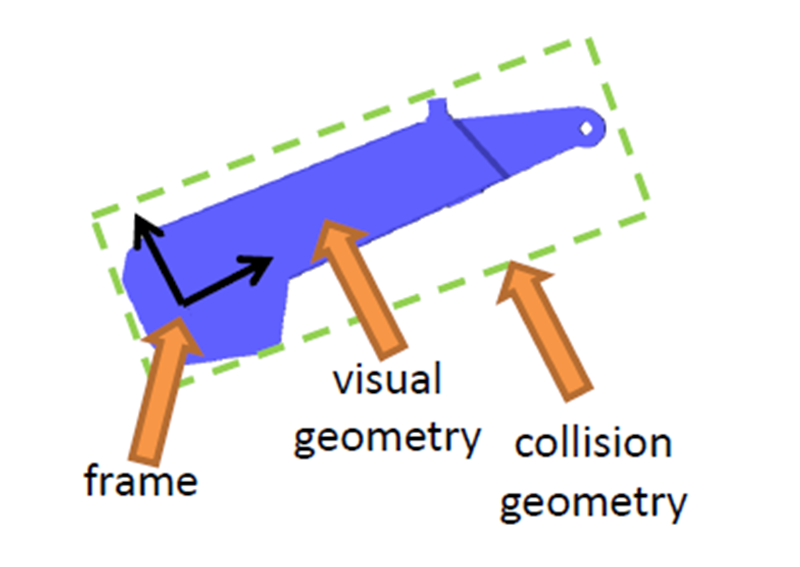
標簽用來描述機器人某個剛體部分的外觀和物理屬性,外觀包括尺寸、顏色、形狀,物理屬性包括質量、慣性矩陣、碰撞參數等。 以這個機械臂連桿為例,它的link描...
柔性機械臂 剛性機械臂建模方法已經可以有效地求解出機械臂各部分之間的耦合情況,但是對于柔性機械臂的動力學建模其側重點在于基于剛性機械臂建模方法的基礎上如...
剛性機械臂 機械臂建模是機械臂控制的基礎,控制效果的好壞很大程度上決定于所建立的動力學模型的準確性。 目前對剛性機械臂的動力學建模方法較多,理論較為成熟...
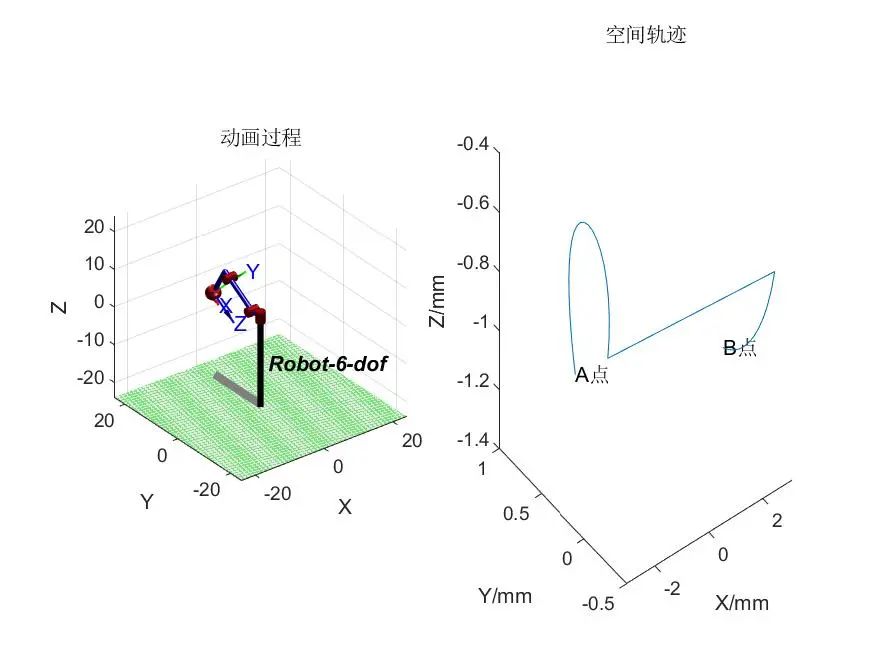
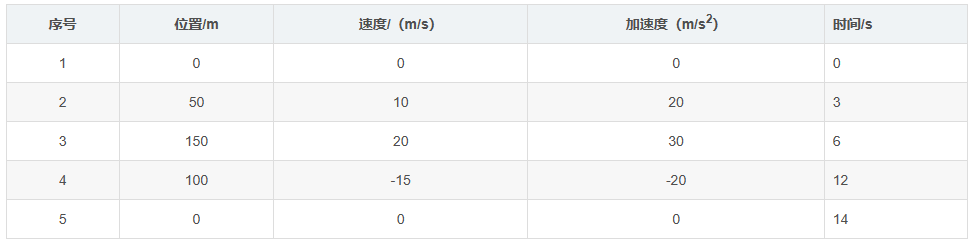
采用五次多項式插值法進行機械臂軌跡規劃,基于Matlab Robotics Toolbox平臺進行關節空間軌跡規劃,得到各關節角度、速度和加速度與時間關...
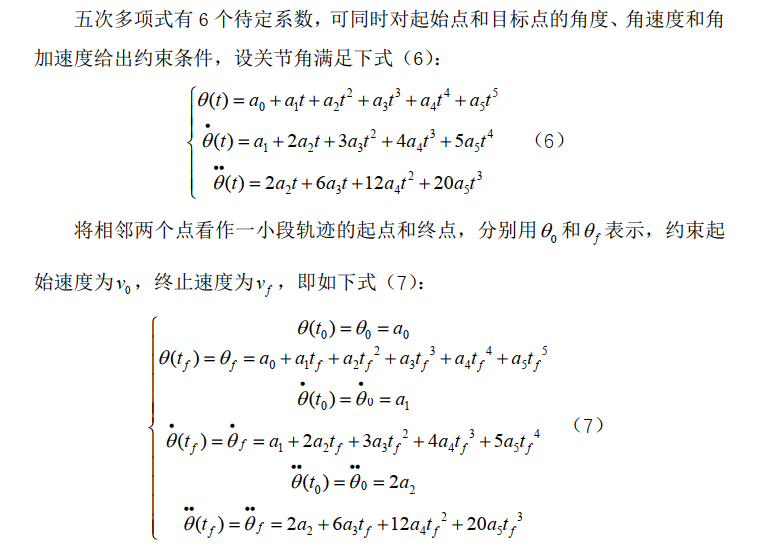
五次多項式插值法 五次多項式有6個待定系數,可同時對起始點和目標點的角度、角速度和角加速度給出約束條件。 數學推導 MATLAB代碼 %五次多項式插值法...
對串聯機械臂而言,軌跡規劃可以分為:關節空間軌跡規劃和笛卡爾空間軌跡規劃。關節空間軌跡規劃是把機器人的關節變量變換成跟時間的函數,然后對角速度和角加速度...
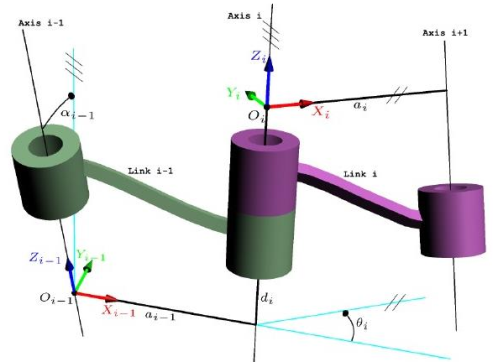
該機械臂 6 個關節都是轉動關節,前 3 個關節確定手腕參考點的位置,后 3個關節確定手腕的方位。和大多數工業機器人一樣,后 3個關節軸線交于一點。因此...

近源滲透測試是網絡空間安全領域逐漸興起的一種新的安全評估手段。它是一種集常規網絡攻防、物理接近、社會工程學及無線電通信攻防等能力于一體的高規格網絡安全評估行動。
(1)什么是力控機器人? 力控機器人(force-controlled robot)是指一類具有力控制能力的機器人系統,它們能夠通過感知和控制機械臂上的...
具有單軸力傳感器的單關節機械臂接觸力估計: 接觸力估計需要考慮多個因素進行補償,以提高估計的準確性。以下是一些常見的補償因素: 1.重力補償:機械臂在接...

工業生產要實現自動化,必然離不開機器視覺的幫忙。RZ/A2M集成了瑞薩第一代DRP(動態可重新配置處理器)技術,擁有超高性能的圖形圖像處理能力。
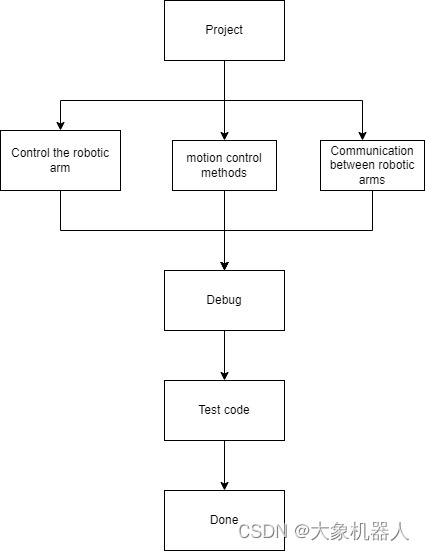
介紹 今天,我將向大家展示一個我獨立設計并實現的機械臂模型。這個模型的核心功能是實現實時的手勢追蹤——只需用手輕輕拖拽,機械臂就能立即跟隨你的動作進行移...
電動夾具具有精確的控制、適應性、安全性和能源效率,在需要精確處理精密部件的行業中是不可或缺的。 機械臂顯著提高了工業生產線的生產率和安全性。傳統的氣動夾...
機器人使用了大量的現代電子信息和控制技術,比如機器人的控制系統,轉動利用的電機驅動技術,采集和定位使用了傳感和視覺檢測以及計算機分析計算技術,執行機構同...

一、行業背景在工業互聯網浪潮高漲的當下,現代工業機器人機械臂在柔性加工等生產中應用越來越廣泛。越來越多的制造企業開始引進具有高效和高精的機器人機械臂應用...
中微愛芯高性能2線串行EEPROM AiP24C128(替代羅姆BR24G02)用于醫用機械臂
EEPROM和FLASH同為存儲芯片,在部分場景,二者會同時應用到一個產品中,記錄報警信息、數據保持、模式切換等重要信息,但由于EEPROM的高可靠性、...
自主抓取是指,在沒有人為干預的情況下,視覺機械臂系統通過攝像頭獲取到目標物體的位置,并且通過驅動機械臂來完成對于目標物體的抓取任務。

機械臂視覺控制技術是一種應用廣泛、發展迅速的技術。相比傳統的機械臂控制技術,機械臂視覺控制技術具有高效、精準、靈活等優勢,可以在工業生產、制造、物流等領...
機械臂是一種由多個關節連接而成的機械結構,類似于人的胳膊。它通常具有可旋轉或可伸縮的關節,使其能夠在空間中執行精確的定位和操作。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

