完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > 相機
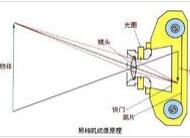
照相機是一種利用光學成像原理形成影像并使用底片記錄影像的設(shè)備,是用于攝影的光學器械。在現(xiàn)代社會生活中有很多可以記錄影像的設(shè)備,它們都具備照相機的特征,比如醫(yī)學成像設(shè)備、天文觀測設(shè)備等。
文章:1224個 瀏覽:53618次 帖子:244個

?綜述導(dǎo)讀:深度學習驅(qū)動下的相機標定技術(shù)
相機模型描述了從三維世界坐標中的點到其在二維圖像平面上投影的成像過程。其中,不同的相機和傳感器系統(tǒng)對應(yīng)不同類型的參數(shù)模型。在本綜述中,我們首先回顧了標準...
2023-05-11 標簽:相機數(shù)據(jù)集深度學習 735 0

設(shè)計惡劣環(huán)境下使用的相機,一定要考慮鏡頭安裝細節(jié)!
用于制造透鏡的玻璃和用于制造固定透鏡的材料都對溫度變化很敏感,當溫度升高或下降時,這可能會使光學系統(tǒng)失焦。然而,有可能使用一種稱為熱化的工藝來減少光學性...
2023-05-10 標簽:探測器相機光學系統(tǒng) 488 0

雜談光場相機的不足、優(yōu)勢、應(yīng)用和展望(中)
盡管光場相機的空間分辨率較低,但是這一問題,有望隨著感光芯片的技術(shù)進步而解決。機器閱讀并去理解圖像,對空間分辨率的需求不一定需要很高,達到人審美需求的那種程度。
飛行時間(TOF)相機的優(yōu)缺點及其應(yīng)用領(lǐng)域
利用TOF技術(shù)成像的設(shè)備被稱為TOF相機(或TOF攝像頭), TOF相機與普通機器視覺成像過程也有類似之處,都是由光源、光學部件、傳感器(TOF芯片)、...

盡管在To C端, 光場相機的表現(xiàn)可謂慘不忍睹,使用者的反饋也是惡評如潮,但是在To B端和學術(shù)界,光場相機依然延續(xù)著比較旺盛的生命力,不僅學術(shù)文章在陸...

這個要從它們的歷史說起,最初 CCD 的成像質(zhì)量的確明顯優(yōu)于 CMOS ,但是 CMOS 比較努力,經(jīng)過幾年的發(fā)展已經(jīng)達到了 CCD 同樣的成像質(zhì)量而且...
但是相機使用,會有哪些問題?本人咨詢過廠商和做光學的同學,他們表示想象不出來相機拍攝會有什么問題,而搞相機鏡頭的人也不清楚這玩意怎么和鏡頭搭配。于是只能...
以前也讀了這個RGBD相機的一些源碼但是發(fā)現(xiàn)自己的基本功是一點也不好,所以就擱置了很久,今天試圖來回答一些問題。
光圈F:光圈是鏡頭的參數(shù),定義是:光圈F值=鏡頭焦距/鏡頭有效口徑直徑,這個值越小光圈越大,代表通光量越大。
智能交通系統(tǒng)中(ITS)是將先進的信息技術(shù)、通訊技術(shù)、傳感技術(shù)、控制技術(shù)以及計算機技術(shù)等有效地集成運用于整個交通運輸管理體系,而建立起的一種在大范圍內(nèi)、...

使用操作符 open_framegrabber 打開與圖像采集設(shè)備的連接時,主要參數(shù)是相應(yīng) HALCON 采集接口的名稱。因此,您將獲得一個所謂的句柄 ...
其實這部分內(nèi)容在大多數(shù)課程和教材中都有涉及,很多人可能也覺得很簡單,有一定的套路可言,但是如標題所說,你真的理解Two View Geometry嗎?筆...
針孔相機的結(jié)構(gòu)相對簡單,由不透光的容器、感光材料和針孔片組成。其中,感光材料可以是底片,也可以是相紙。為了控制曝光,通常還需要有快門結(jié)構(gòu)。
在上一篇文章里我們簡單了解圖像傳感器的原理、種類和區(qū)別。除了CIS接觸式圖像傳感器,一直以來,人們經(jīng)常討論CMOS和CCD兩種圖像傳感器之間的比較優(yōu)勢,...
選擇正確的照明是機器視覺系統(tǒng)應(yīng)用成功與否的關(guān)鍵,光源直接影響到圖像的質(zhì)量,進而影響到系統(tǒng)的性能。
運動目標檢測的主要目的是從圖片序列中將變化區(qū)域或者運動物體從背景圖像中分離出來,常用于視頻監(jiān)控、異常檢測、三維重建、實時定位與建圖等領(lǐng)域。運動目標檢測是...
劃痕測量↑ 如上圖,以直徑為28.3的鏡片來計算像素大小。相較于缺口,劃痕的寬度更小,更不容易識別。相機的像素確定將基于劃痕。由圖可以看出,一個方格的...
DeepFusion:基于激光雷達和相機深度融合的多模態(tài)3D目標檢測
在Waymo Open Dataset上,DeepFusion分別提高了幾種主流的3D檢測模型的精度,如PointPillars [16]、Center...
工業(yè)鏡頭景深計算及工業(yè)鏡頭技術(shù)分析
物體和鏡頭之間間隔(W.D)雖然改變,介在前后必定規(guī)模內(nèi)所成像依然感受明晰,這個間隔規(guī)模補稱為景深。相反的,對應(yīng)于斷定的物平面,成像面和鏡頭之間的間隔不...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1