完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 驅(qū)動(dòng)
驅(qū)動(dòng)程序即添加到操作系統(tǒng)中的一小塊代碼,其中包含有關(guān)硬件設(shè)備的信息。有了此信息,計(jì)算機(jī)就可以與設(shè)備進(jìn)行通信。驅(qū)動(dòng)程序是硬件廠商根據(jù)操作系統(tǒng)編寫的配置文件,可以說沒有驅(qū)動(dòng)程序,計(jì)算機(jī)中的硬件就無法工作。
文章:1049個(gè) 瀏覽:85402次 帖子:1088個(gè)
時(shí)鐘子系統(tǒng)中clock驅(qū)動(dòng)實(shí)例
clock驅(qū)動(dòng)實(shí)例 clock驅(qū)動(dòng)在時(shí)鐘子系統(tǒng)中屬于provider,provider是時(shí)鐘的提供者,即具體的clock驅(qū)動(dòng)。 clock驅(qū)動(dòng)在Linu...
2023-09-27 標(biāo)簽:驅(qū)動(dòng)LinuxClocks 833 0
Linux內(nèi)核reset驅(qū)動(dòng)實(shí)例
reset驅(qū)動(dòng)實(shí)例 類似于clock驅(qū)動(dòng),reset驅(qū)動(dòng)也是編進(jìn)內(nèi)核的,在Linux啟動(dòng)時(shí),完成reset驅(qū)動(dòng)的加載。 設(shè)備樹 reset : rese...
2023-09-27 標(biāo)簽:內(nèi)核驅(qū)動(dòng)Linux 805 0
時(shí)鐘和復(fù)位是兩個(gè)不同的驅(qū)動(dòng),但通常都是由負(fù)責(zé)clock驅(qū)動(dòng)的人,把reset驅(qū)動(dòng)完成。同樣,reset驅(qū)動(dòng)也是由芯片廠商去完成的。 reset API使...
2023-09-27 標(biāo)簽:驅(qū)動(dòng)LinuxAPI 1185 0
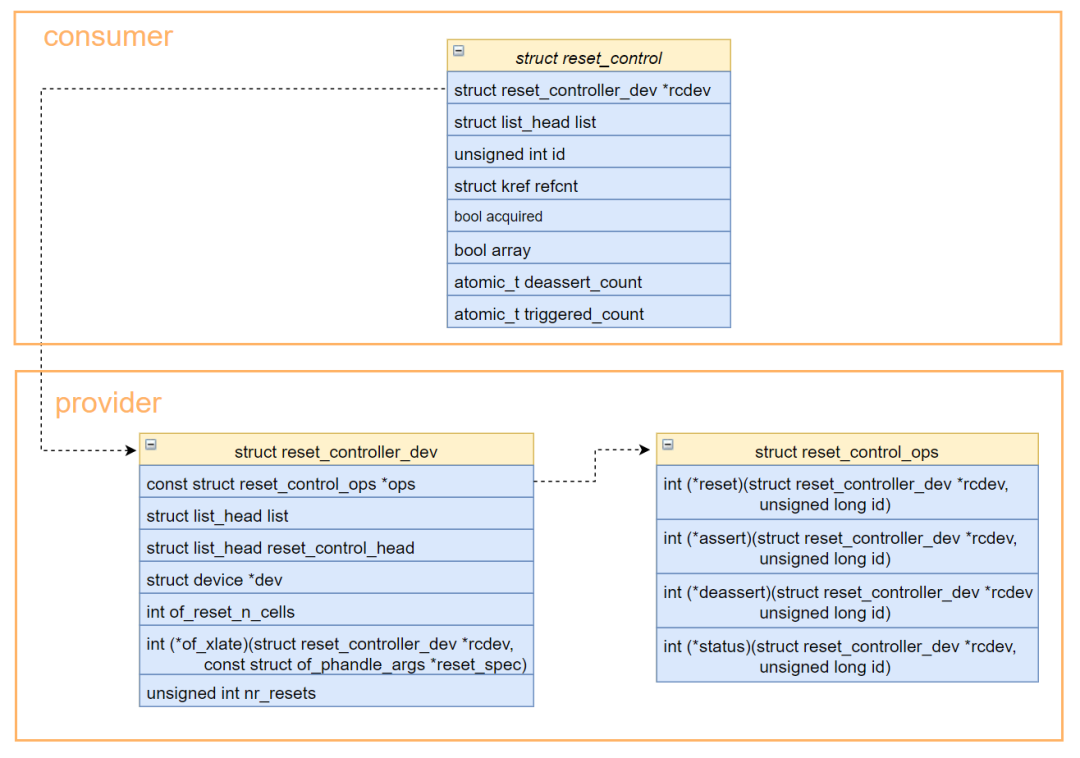
Linux reset子系統(tǒng) reset子系統(tǒng)非常簡(jiǎn)單,與clock子系統(tǒng)非常類似,但在驅(qū)動(dòng)實(shí)現(xiàn)上,reset驅(qū)動(dòng)更簡(jiǎn)單。 因?yàn)閏lock驅(qū)動(dòng)主要是時(shí)鐘...
2023-09-27 標(biāo)簽:驅(qū)動(dòng)Linux子系統(tǒng) 789 0
在驅(qū)動(dòng)中創(chuàng)建sysfs接口完整例子
設(shè)備樹: leds : leds{ compatible = "xx,xx-led"; }; 驅(qū)動(dòng): static unsigned int led =...
2023-09-27 標(biāo)簽:接口驅(qū)動(dòng)Linux 481 0
sysfs接口創(chuàng)建 基本步驟: 1、使用 DEVICE_ATTR 聲明一個(gè) sys 節(jié)點(diǎn) static DEVICE_ATTR ( led_status...
2023-09-27 標(biāo)簽:接口驅(qū)動(dòng)Linux 510 0
proc新接口 注意,在較新版本的內(nèi)核中, procfs 的函數(shù)接口有所變化。 系統(tǒng) 內(nèi)核版本 Linux 5.10.111 在驅(qū)動(dòng)中添加以下代碼: #...
2023-09-27 標(biāo)簽:內(nèi)核接口驅(qū)動(dòng) 447 0
Linux驅(qū)動(dòng)中procfs接口的創(chuàng)建
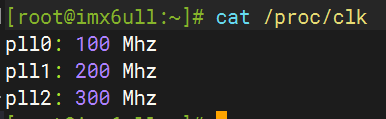
procfs接口創(chuàng)建 實(shí)現(xiàn)效果: 例如, 在 /proc 下創(chuàng)建一個(gè)clk節(jié)點(diǎn),通過 cat /proc/clk 可查看內(nèi)容: 在驅(qū)動(dòng)中添加以下代碼: ...
2023-09-27 標(biāo)簽:接口驅(qū)動(dòng)Linux 380 0
函數(shù)接口說明 創(chuàng)建目錄、文件函數(shù): /* 創(chuàng)建目錄 */ struct dentry *debugfs_create_dir( const char *...
2023-09-27 標(biāo)簽:接口驅(qū)動(dòng)Linux 495 0
Linux驅(qū)動(dòng)debugfs接口代碼實(shí)現(xiàn)
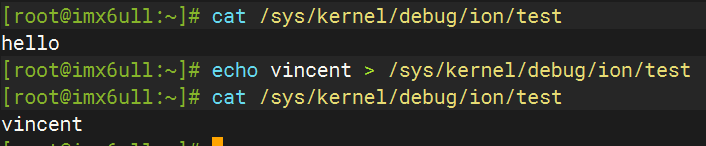
實(shí)現(xiàn)效果 在 /sys/kernel/debug/ 目錄下創(chuàng)建一個(gè) ion/test 文件,通過 cat 、 echo 的方式進(jìn)行讀寫操作: 前期準(zhǔn)備 ...
2023-09-27 標(biāo)簽:接口驅(qū)動(dòng)Linux 541 0
Linux中LED驅(qū)動(dòng)的應(yīng)用層控制
今天,我們就站在巨人的肩膀上,利用內(nèi)核開發(fā)者已經(jīng)寫好的驅(qū)動(dòng)來實(shí)現(xiàn)我們想要的功能。 應(yīng)用層控制 除了可以在shell中通過 echo 、 cat 的方式控...
2023-09-27 標(biāo)簽:led驅(qū)動(dòng)Linux 569 0
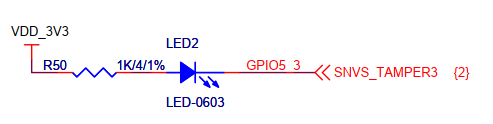
如何實(shí)現(xiàn)Linux下的LED驅(qū)動(dòng)
LED驅(qū)動(dòng) 我們以imx6ull pro開發(fā)板的板載led為例,其板載了一個(gè)可控制的Led2,原理圖如下: LED2進(jìn)行上拉電阻,另外一個(gè)管腳接到了 G...
2023-09-27 標(biāo)簽:led驅(qū)動(dòng)Linux 603 0
Linux驅(qū)動(dòng)內(nèi)核模塊參數(shù)介紹
在加載一個(gè).ko模塊時(shí),也可以像應(yīng)用程序那樣,通過命令行傳入一些參數(shù),這個(gè)過程發(fā)生在調(diào)用模塊初始化函數(shù)之前。 內(nèi)核支持的參數(shù)類型有: bool 、 in...
2023-09-26 標(biāo)簽:模塊內(nèi)核驅(qū)動(dòng) 734 0
最簡(jiǎn)單的驅(qū)動(dòng) # include # include # include static int __init my_init ( void ) { pr...
2023-09-26 標(biāo)簽:模塊驅(qū)動(dòng)Linux 951 0
首先在設(shè)備樹里定義一個(gè)節(jié)點(diǎn),例如: uart0:?serial@10010000?{ ???compatible?=?"sifive,uart0"; ?...
2023-09-26 標(biāo)簽:寄存器驅(qū)動(dòng)Linux 853 0
Linux驅(qū)動(dòng)開發(fā)知識(shí)點(diǎn)
1、驅(qū)動(dòng)程序分為幾類? 字符設(shè)備驅(qū)動(dòng) 塊設(shè)備驅(qū)動(dòng) 網(wǎng)絡(luò)設(shè)備驅(qū)動(dòng) 2、字符設(shè)備驅(qū)動(dòng)需要實(shí)現(xiàn)的接口通常有哪些 open、close、read、write、i...
2023-09-26 標(biāo)簽:驅(qū)動(dòng)Linux開發(fā) 667 0
定時(shí)器使用示例 使用步驟: 1、調(diào)用 init_timer 初始化一個(gè)定時(shí)器,給 struct timer_list 各成員賦值。 2、調(diào)用 add_t...
2023-10-04 標(biāo)簽:內(nèi)核驅(qū)動(dòng)Linux 702 0
Linux驅(qū)動(dòng)高精度定時(shí)器hrtimer
高分辨率定時(shí)器( hrtimer )以 ktime_t 來定義時(shí)間, 精度可以達(dá)到納秒級(jí)別 , ktime_t 定義如下: typedef s64 kt...
2023-10-04 標(biāo)簽:驅(qū)動(dòng)Linux定時(shí)器 687 0
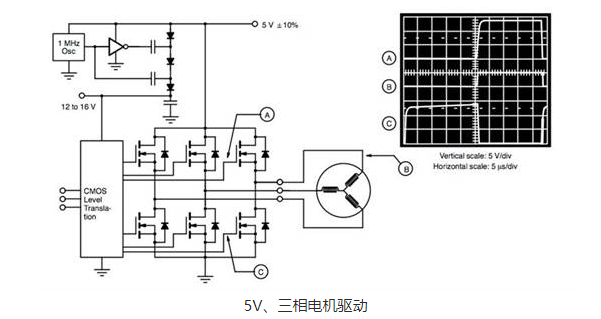
N通道雙MOSFET的低壓電機(jī)驅(qū)動(dòng)設(shè)計(jì)
本應(yīng)用筆記介紹了采用表面貼裝封裝的 n 通道雙 MOSFET 的低壓電機(jī)驅(qū)動(dòng)設(shè)計(jì)。它描述了使用不同電壓應(yīng)用的設(shè)計(jì),以及自適應(yīng) MOSFET 柵極驅(qū)動(dòng)器,...
2023-10-05 標(biāo)簽:MOSFET驅(qū)動(dòng)表面貼裝 1343 0

Hi7020智芯支持高輝調(diào)光,調(diào)光比 65536:1恒流驅(qū)動(dòng)器非隔離式大功率恒流
說明Hi7020是一款外圍電路簡(jiǎn)單的多功能平均電流型LED恒流驅(qū)動(dòng)器,適用于寬電壓范圍的非隔離式大功率恒流LED驅(qū)動(dòng)領(lǐng)域。芯片PWM端口支持超小占空比的...
2023-09-15 標(biāo)簽:照明驅(qū)動(dòng)恒流 1647 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1


