完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > L298N

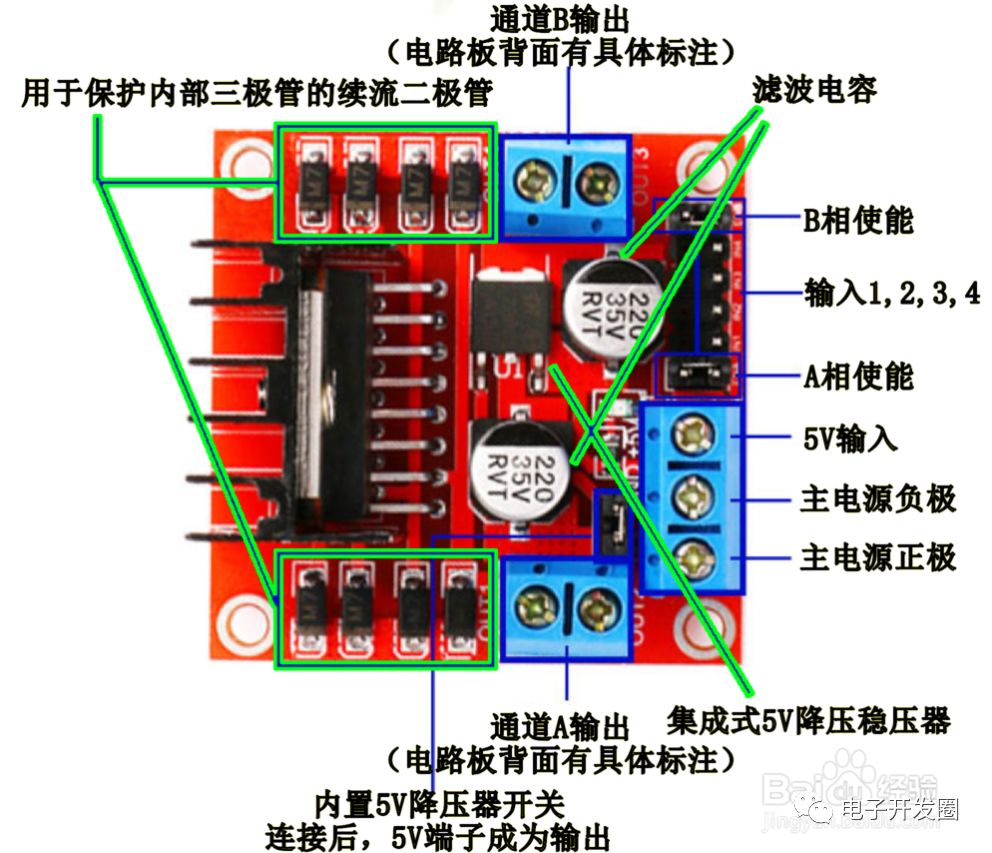
L298N 是一種雙H橋電機(jī)驅(qū)動芯片,其中每個H橋可以提供2A的電流,功率部分的供電電壓范圍是2.5-48v,邏輯部分5v供電,接受5vTTL電平。一般情況下,功率部分的電壓應(yīng)大于6V否則芯片可能不能正常工作。
L298N 是一種雙H橋電機(jī)驅(qū)動芯片,其中每個H橋可以提供2A的電流,功率部分的供電電壓范圍是2.5-48v,邏輯部分5v供電,接受5vTTL電平。一般情況下,功率部分的電壓應(yīng)大于6V否則芯片可能不能正常工作。
L298N 是一種雙H橋電機(jī)驅(qū)動芯片,其中每個H橋可以提供2A的電流,功率部分的供電電壓范圍是2.5-48v,邏輯部分5v供電,接受5vTTL電平。一般情況下,功率部分的電壓應(yīng)大于6V否則芯片可能不能正常工作。
L298N該型號價格今年大部分時間比較平穩(wěn),只有一兩個月價格波動幅度偏大,但持續(xù)時間很短。
L298N近期所報參考價區(qū)間為8元/pcs—30元/pcs,量少零售參考價格為23元/pcs,1000pcs以上參考價格為18元/pcs。
很快恢復(fù)平穩(wěn)價格8元/pcs—30元/pcs。

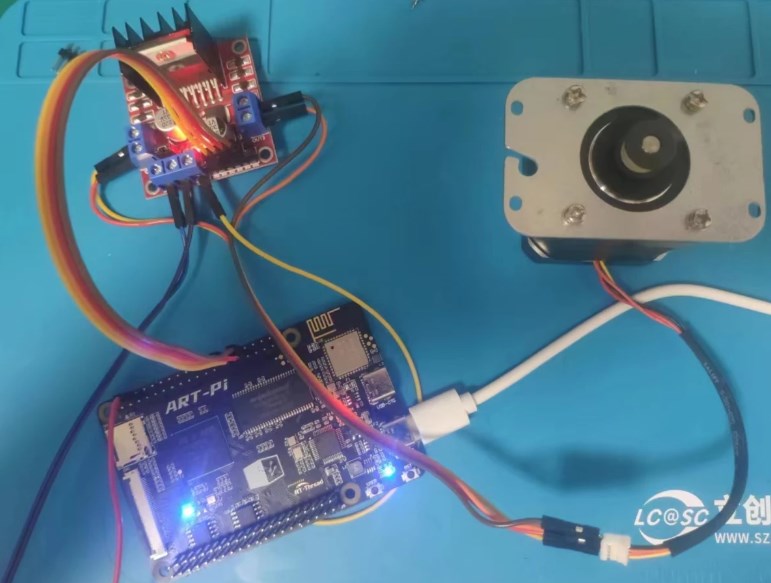
什么是步進(jìn)電機(jī)?簡單的步進(jìn)電機(jī)驅(qū)動調(diào)試
收拾東西發(fā)現(xiàn)一個步進(jìn)電機(jī)(應(yīng)該是之前從攝像頭拆下來的,42步進(jìn)電機(jī)),驅(qū)動一下試試。簡單記錄一下,內(nèi)容比較簡單,歡迎大家指正。
2023-11-27 標(biāo)簽:電機(jī)驅(qū)動步進(jìn)電機(jī)正反轉(zhuǎn)控制 2651 0
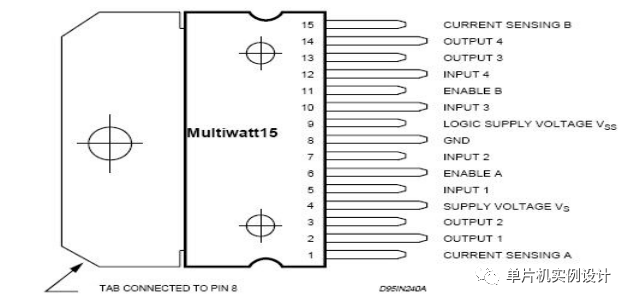
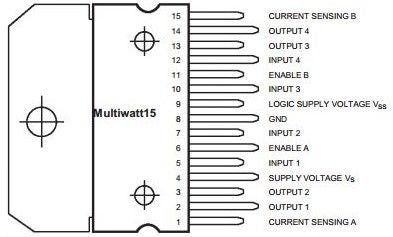
一.L298N芯片 L298是15腳Multiwatt封裝的L298N,內(nèi)部包含4通道邏輯驅(qū)動電路;是一種二相和四相電機(jī)的專用驅(qū)動器,即內(nèi)含二個H橋的高...
L298N,是一款接受高電壓的電機(jī)驅(qū)動器,直流電機(jī)和步進(jìn)電機(jī)都可以驅(qū)動。一片驅(qū)動芯片可同時控制兩個直流減速電機(jī)做不同動作,在6V到46V的電壓范圍內(nèi),提...
2023-03-01 標(biāo)簽:電流電機(jī)驅(qū)動器L298N 7396 0

基于L298N芯片對離子滲氮中壓強(qiáng)的控制設(shè)計方案
眾所周知,離子滲氮工藝對爐體內(nèi)壓強(qiáng)的控制要求比較高,因此本文設(shè)計了一種基于L298N芯片驅(qū)動直流電動機(jī)控制的氣體流量控制器,可用于控制反應(yīng)爐的抽氣氣體流量。
基于L298N的直流電動機(jī)驅(qū)動芯片設(shè)計
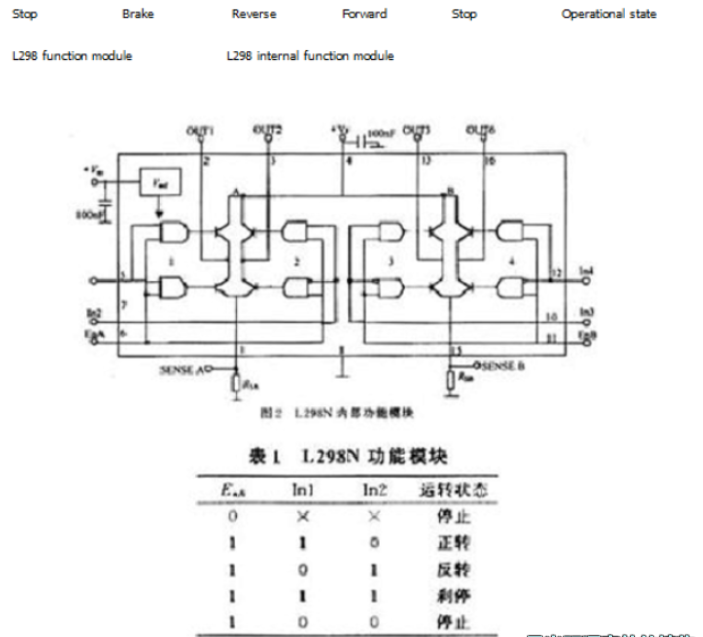
L298是SGS的產(chǎn)品。最常見的是采用15引腳Multiwatt 封裝的L298N 。內(nèi)部還包含一個4通道邏輯驅(qū)動器電路。驅(qū)動兩臺直流電動機(jī)或一臺兩相步...
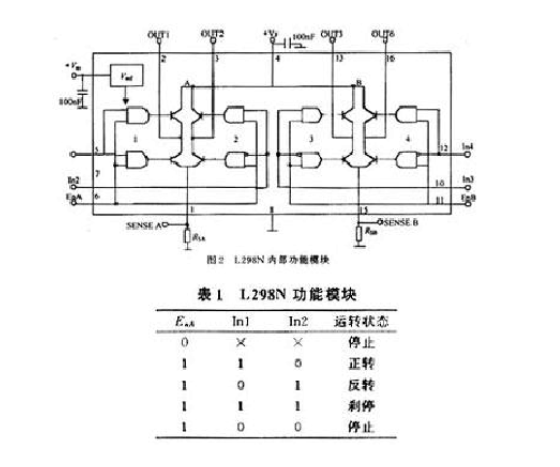
虛線框圖1控制電機(jī)正反轉(zhuǎn),U1A,U2A是比較器,VI來自爐體壓強(qiáng)傳感器的電壓。當(dāng)VI>VRBF1時,U1A輸出高電平,U2A輸出高電平經(jīng)反相器變?yōu)榈碗?..
一、 壁障小車的制作 1、 制作避障小車的準(zhǔn)備工作 硬件:Arduino UNO、L298N驅(qū)動模塊、超聲波模塊、小車底盤、舵機(jī)模塊、一塊面包板、一些杜...
l298n驅(qū)動電機(jī)的工作原理_L298N驅(qū)動步進(jìn)電機(jī)程序
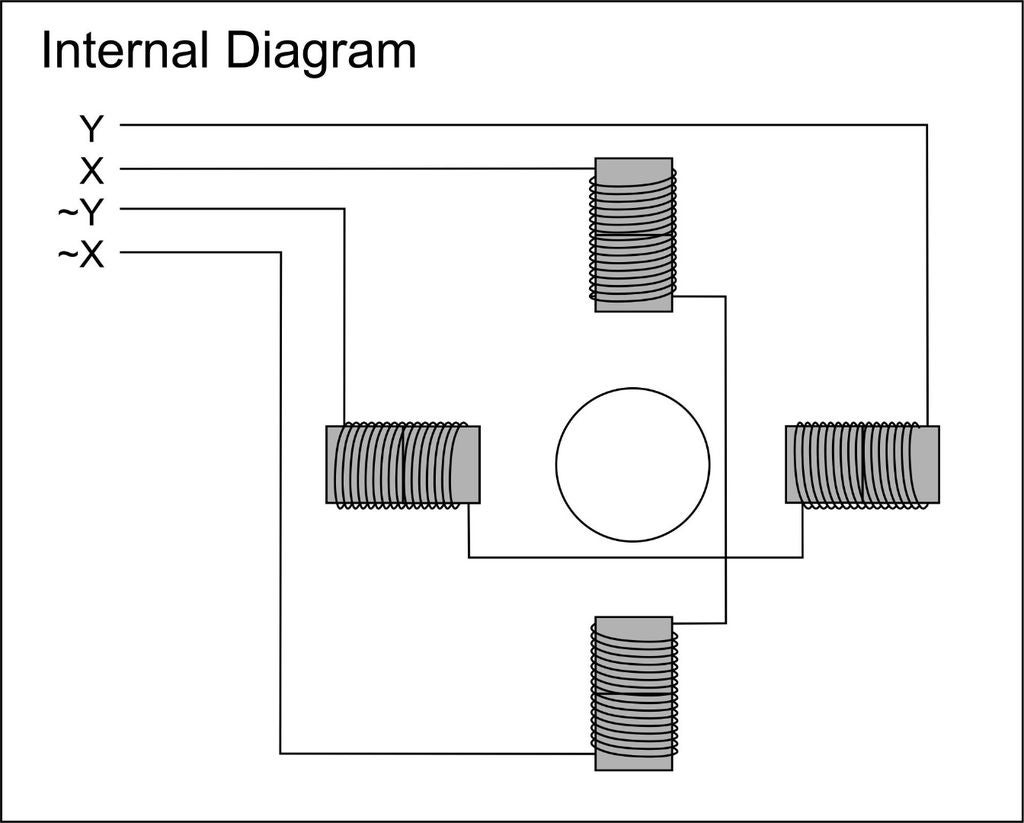
步進(jìn)電動機(jī)是一種將電脈沖信號轉(zhuǎn)換成角位移或線位移的機(jī)電元件。步進(jìn)電動機(jī)的輸入量是脈沖序列,輸出量則為相應(yīng)的增量位移或步進(jìn)運(yùn)動。正常運(yùn)動情況下,它每轉(zhuǎn)一周...
2018-02-26 標(biāo)簽:步進(jìn)電機(jī)l298n 7.0萬 1
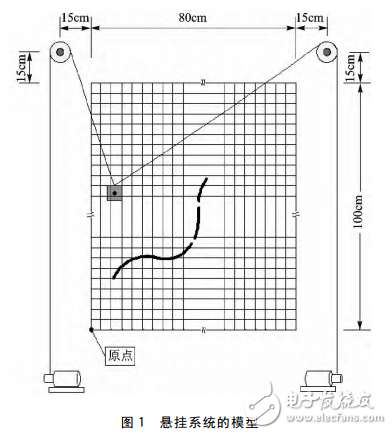
TMS320F28027與L298N的懸掛運(yùn)動控制系統(tǒng)設(shè)計
本文主要介紹了TMS320F28027與L298N的懸掛運(yùn)動控制系統(tǒng)設(shè)計。以TMS320F28027為控制芯片,利用L298N驅(qū)動兩個步進(jìn)電機(jī)。步進(jìn)電機(jī)...
2018-02-26 標(biāo)簽:控制系統(tǒng)l298ntms320f28027 4063 0
直流電機(jī)是指能將直流電能轉(zhuǎn)換成機(jī)械能(直流電動機(jī))或?qū)C(jī)械能轉(zhuǎn)換成直流電能(直流發(fā)電機(jī))的旋轉(zhuǎn)電機(jī)。它是能實現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī)。當(dāng)它作電動...
L298N 電機(jī)驅(qū)動模塊用戶手冊與原理圖立即下載
類別:電子資料 2023-10-18 標(biāo)簽:L298N電機(jī)驅(qū)動模塊
L298N 電機(jī)驅(qū)動模塊--配套程序立即下載
類別:電子資料 2023-10-18 標(biāo)簽:程序L298N電機(jī)驅(qū)動模塊
CEPARK-L298N電機(jī)驅(qū)動模塊元件清單立即下載
類別:電子資料 2023-10-13 標(biāo)簽:電機(jī)驅(qū)動L298N
CEPARK L298N(帶光耦)電機(jī)驅(qū)動模塊原理圖立即下載
類別:電子資料 2023-10-13 標(biāo)簽:電機(jī)驅(qū)動L298N
CEPARK L298N(帶光耦)電機(jī)驅(qū)動模塊配套程序立即下載
類別:電子資料 2023-10-13 標(biāo)簽:電機(jī)驅(qū)動L298N
使用Raspberry Pi和BluPants進(jìn)行編碼立即下載
類別:電子資料 2023-07-05 標(biāo)簽:機(jī)器人L298NRaspberry Pi
想做一個STM32的小車,偶然在B站上看到某人做的STM32藍(lán)牙小車,小車可以進(jìn)行紅外檢測,能自動避障。看起來挺好玩,實踐性也很強(qiáng)。
L298N可對電機(jī)進(jìn)行直接控制,通過主控芯片的I/O輸出電平對電機(jī)的轉(zhuǎn)動進(jìn)行設(shè)定,進(jìn)而可以實現(xiàn)電機(jī)正轉(zhuǎn)反轉(zhuǎn)驅(qū)動,操作簡單、穩(wěn)定性好,可以滿足直流電機(jī)的大...
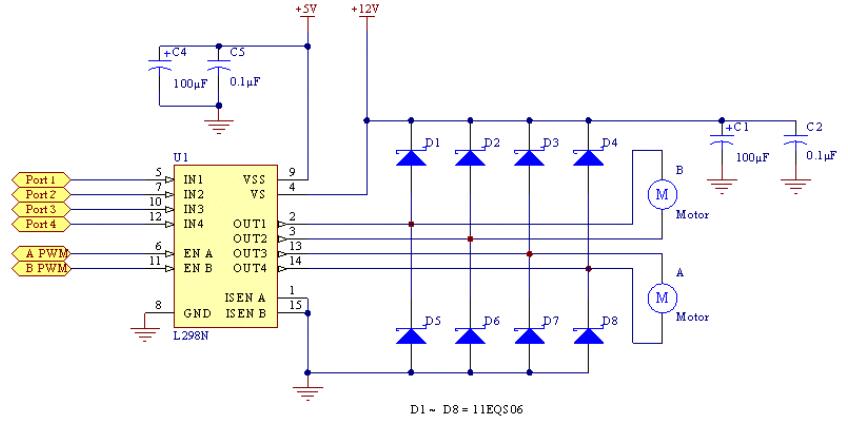
只找到了一個來L298N的驅(qū)動電路,可以驅(qū)動兩個直流電機(jī),需要兩個電源5V,12V。可以實現(xiàn)直流電機(jī)正反轉(zhuǎn),停止控制。這里介紹下肖基特二極管。
怎樣使用Keyes L298N驅(qū)動雙極步進(jìn)電機(jī)
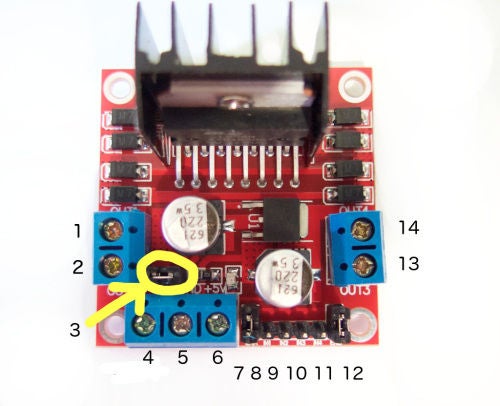
當(dāng)我測量引腳1時引腳2在左側(cè)顯示“ 1”,表示“超出范圍”。當(dāng)我測量引腳2和引腳3時,也會發(fā)生同樣的事情。這意味著它們沒有連接
2019-11-19 標(biāo)簽:步進(jìn)電機(jī)L298N 4898 0
怎樣與Arduino和L298N H橋配合使用以實現(xiàn)雙極步進(jìn)電機(jī)控制
所以我在原始文章中沒有真正提到的一些事情我非常重視在處理過程中。其中的主要問題是:
2019-10-24 標(biāo)簽:步進(jìn)電機(jī)L298NArduino 5875 0
如何使用L298N雙電機(jī)控制器模塊和Arduino控制DC和步進(jìn)電機(jī)
最后,如果從模塊中獲取5V電壓,則將Arduino GND連接至模塊上的點5,將Arduino 5V連接至點6。借助Arduino IDE隨附的Step...
2019-11-04 標(biāo)簽:步進(jìn)電機(jī)L298NArduino 1.1萬 0
怎樣用Arduino和L298N電機(jī)驅(qū)動器控制直流電機(jī)
直流電機(jī)是初學(xué)者和業(yè)余愛好者遇到的最簡單的電機(jī)。操作非常簡單:將電機(jī)的兩根導(dǎo)線連接到電池的兩個端子即可!電機(jī)開始旋轉(zhuǎn)。
怎樣用樹莓派和L298N電機(jī)驅(qū)動器模塊控制步進(jìn)電機(jī)
如果您還記得以前的Raspberry Pi教程,我們已經(jīng)看到如何使用RASPBERRY PI控制直流電機(jī)以及如何使用RASPBERRY PI控制伺服電機(jī)。
2019-07-29 標(biāo)簽:步進(jìn)電機(jī)電機(jī)驅(qū)動器L298N 2.1萬 0
L298N是雙H橋驅(qū)動器IC,是一種為制造商提供功能強(qiáng)大,易于使用且經(jīng)濟(jì)高效的解決方案。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1