完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > KUKA

庫卡機器人(上海)有限公司是德國庫卡公司設在中國的全資子公司,成立于2000年,是世界上頂級工業機器人制造商之一。庫卡可以提供負載量從3千克至1000千克的標準工業6軸機器人以及一些特殊應用機器人,機械臂工作半徑從635毫米到3900毫米,全部由一個基于工業PC平臺的控制器控制,操作系統采用Windows XP系統。

庫卡 socket 一切關于 socket 配置的操作,都基于一個或多個 xml 文件。

如果 CHAR 類型數組的所有數組元素都擁有相同的字符串,則不必單獨初始化每個數組元素。忽略右側的數組下標。(對于一維數

如果沒有與選擇標準匹配的標識符,則處理DEFAULT塊。如果沒有DEFAULT塊,則不處理任何塊,并且程序在ENDSWI

通過功能配置建議可在 WorkVisual 中自動安裝或更新控制器總線。不再需要添加單個設備、連接設備、添加 Waggo

“概述”區域顯示所有現有的TOOLS、BASES和外部運動學,每個都在一個單獨的選項卡中。

通過 smartPAD 2 可以對 KR C5 進行全面操作和編程。smartPAD 2 是一臺獨立的“計算機”,采用基
搜索字符串變量 用功能 StrFind() 可以搜索字符串變量的字符串。 Result = StrFind(
該變量可用于評估相對于提前運行的當前執行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當的故障服務功能對其進行
或者可以通過 WorkVisual 更改密碼。如果在機器人控制系統上安裝了 KUKA.NonAdmin,則只能通過 Wo
本例中的外部軸的運動指令可以在SUB程序中使用,前提是它被分配給系統提交,而不是擴展提交。 IF (($IN[12] =

庫卡機器人(上海)有限公司是德國庫卡公司設在中國的全資子公司,成立于2000年,是世界上頂級工業機器人制造商之一。庫卡可以提供負載量從3千克至1000千克的標準工業6軸機器人以及一些特殊應用機器人,機械臂工作半徑從635毫米到3900毫米,全部由一個基于工業PC平臺的控制器控制,操作系統采用Windows XP系統。
庫卡機器人廣泛應用在儀器儀表、汽車、航天、消費產品、物流、食品、制藥、醫學、鑄造、塑料等工業。主要應用于材料處理、機床裝料、裝配、包裝、堆垛、焊接、表面修整等領域。
庫卡在各個行業與卓越的行業專家合作,為您提供最理想的解決方案。集成商們通過庫卡的合作伙伴網絡整合到一起。與各行業機器制造商、系統合作伙伴以及創新的終端用戶的緊密合作是庫卡成功的基石之一。不斷挑戰自我,并不斷將我們的解決方案完美化,使得我們不斷前進并更加成功。
KR QUANTEC nano 系列機器人向清潔噴嘴座輸送工件。在此期間,機器人須接觸大量含化學添加劑的清潔介質并承受清潔過程中的高溫和強壓。

碼垛分為卸垛和堆垛,物料的卸垛就是機器人將物料從物料庫取出,依次放在卸垛區(物料托盤上)的過程,物料的堆垛就是機器人將物料從堆垛區(物料托盤)抓起,依次...
KUKA C4機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯
KUKA C4 機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯可能的原因1.原因:在VorkVisual項目中RDC
RESUME 將中斷在聲明當前中斷的層面以下的所有運行中的中斷程序和所有運行中的子程序。 RESUME 只允許出現在中斷程序中。(但是不在由聲明為 GL...

$POS_ACT 當前笛卡爾機器人位置 E6POS結構類型的變量定義了TCP相對于BASE坐標系的設定點位置。 ? X、Y、Z:原點沿軸的偏移,單位為[...
WorkVisual將機器人控制系統配給實際應用的機器人控制系統步驟
用該操作步驟可將項目中的每個機器人控制系統分配給一個實際應用的機器人控制系統。然后,項目可從 WorkVisual 傳輸到實際應用的機器人控制系統中。

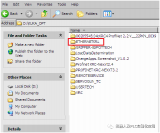
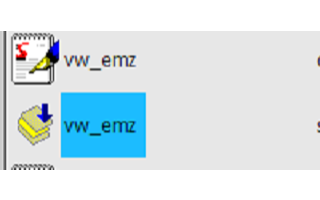
? 可以通過目錄管理單獨添加SGB選件包中未包括的目錄元素。 必須添加目錄元素“ VW_SGB”。 通過文件插入合適的鉗子→目錄管理 通過拖放將鉗子電機...
控制器是工業機器人的三大核心零部件之一,也是工業機器人的大腦,它的好壞直接決定了機器人性能的優劣。因此,不管是 ABB、KUKA,還是新松、新時達等,國...
局部子程序允許多次調用 局部程序名稱需要使用括號 運行完畢局部子程序后,跳回到調出子程序后面的第一個指令
通過 XML 文件配置以太網連接。針對每個連接,必須在機器人控制系統的目錄 C:KRCROBOTERConfigUserCommonEthernetKR...
最近出了C4機器人我又撿起了C2機器人的維修工作,由于本身對C2的接觸時間不久就開始學習了C4機器人,因此很多時候沒有C4機器人掌握的好。這幾天就一直在...
變量$TORQMON包含程序模式下軸轉矩的當前公差范圍。該公差范圍是使用文件…STEU Mada $ custom.dat中的變量$TORQMON_DE...
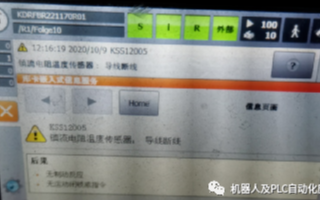
最近我的KUKA機器人:鎮流器電阻溫度傳感器:導線斷線 鎮流電阻 鎮流電阻說明 :鎮流電阻用于制動過程中產生的中間回路電壓的放電。 制動時的放電形式: ...
KUKAC4大眾版機器人報"伺服焊鉗的滯后故障分析"如何解決
? 我們經常出現拉拽故障: SWITCH $SoftPlcint[21] 軟PLC反饋產生提示信息: CASE 1 USER_MSG.MSG_TXT[]...
在 KR C4 上安裝 PROFINET 選項 KUKA系統軟件8.2或VW系統軟件8.2以上: 1.連接通過控制器上提供使用的一個網絡端口 KLI (...
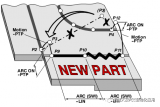
我們通過KUKA計算器或著運算程序可以得出:這個X向的偏差可以使工具坐標的X偏移9.848,Y方向偏移1.736A旋轉10.0這就偏差的換算。表面上是工...
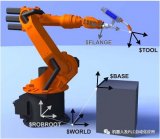
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1