完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動態(tài)的最佳平臺。
視覺定位應(yīng)用主要是找到物體的位置,那么怎么找?在這里一個(gè)重要的步驟就是標(biāo)定,標(biāo)定是把相機(jī)的像素坐標(biāo)系轉(zhuǎn)換為機(jī)械上的物理坐標(biāo)系,使得圖像中的識別的像素值轉(zhuǎn)換為機(jī)械坐標(biāo)值后發(fā)送給機(jī)械運(yùn)動,找到目標(biāo)位置。...

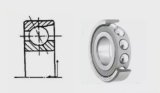
套圈與球之間有接觸角,標(biāo)準(zhǔn)的接觸角為15°、30°和40°,接觸角越大軸向負(fù)荷能力也越大,接觸角越小則越有利于高速旋轉(zhuǎn),單列軸承可承受徑向負(fù)荷與單向軸向負(fù)荷。...
順控器的任務(wù)分為多個(gè)單獨(dú)的步。 在這些步中,可定義 CPU 在某些已定義條件下要執(zhí)行的指令。 在執(zhí)行程序期間,會連續(xù)執(zhí)行各個(gè)步。...
首先,我們要了解電纜的規(guī)格。電機(jī)的電纜通常由其截面積、絕緣材料、長度和工作環(huán)境等決定。電機(jī)的功率、電壓和電流等參數(shù)也是選擇電纜的重要依據(jù)。...

通過對軟件的輸入進(jìn)行控制,從而達(dá)到不同的測試結(jié)果,通過輸入輸出的差異比較測試是否正確和準(zhǔn)確,從而發(fā)現(xiàn)系統(tǒng)中的漏洞,展開研發(fā)修改與測試驗(yàn)證的循環(huán)過程。...
像特斯拉和華為這樣的54槽6極的電機(jī),在這種格局下不妨就采用調(diào)大電流去推高轉(zhuǎn)速和扭矩的路線,從用戶角度更容易被接受。而比亞迪雖然電機(jī)控制系統(tǒng)不好做,但8級72槽的這個(gè)設(shè)計(jì),相當(dāng)于更多的電極一起并聯(lián)出力。...
在伺服電機(jī)系統(tǒng)中,通常會有兩個(gè)重要的參考位置,即伺服電機(jī)零點(diǎn)和原點(diǎn)。伺服電機(jī)零點(diǎn)是指電機(jī)的初始位置,也可以理解為初始零位或歸零位置。...
作為以應(yīng)用發(fā)展趨勢為產(chǎn)品技術(shù)導(dǎo)向的企業(yè),思特威歸納總結(jié)了工業(yè)各應(yīng)用領(lǐng)域/應(yīng)用場景對于智能化圖像處理的實(shí)際需求,開拓了以下三大類別產(chǎn)品系列:面陣、智能交通系統(tǒng)(ITS)、線陣,全方位覆蓋主流工業(yè)智能化場景。...
通電后電機(jī)不轉(zhuǎn)有嗡嗡聲 1、故障原因 ①轉(zhuǎn)子繞組有斷路(一相斷線)或電源一相失電; ②繞組引出線始末端接錯(cuò)或繞組內(nèi)部接反; ③電源回路接點(diǎn)松動,接觸電阻大; ④電動機(jī)負(fù)載過大或轉(zhuǎn)子卡住;...
汽車行業(yè)過去一直是機(jī)器人應(yīng)用最主要領(lǐng)域,隨著自動化需求的提升,工業(yè)機(jī)器人應(yīng)用得到更大的拓展,除傳統(tǒng)的焊接應(yīng)用外,機(jī)器人在機(jī)床上下料、物料搬運(yùn)碼垛、打磨、噴涂、裝配等領(lǐng)域也得到了廣泛應(yīng)用。...
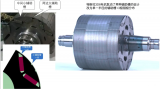
根據(jù)我們經(jīng)驗(yàn),軟劃傷在同軸光效果下,光源工作距離越高,效果越明顯。然而同一光源,光源工作距離高的同時(shí),光源發(fā)光面越小,光源亮度也隨之減弱。效果與實(shí)際情況不可兼得。...

自動絡(luò)筒機(jī)目前已全面實(shí)現(xiàn)單錠控制,單錠動力驅(qū)動中大量采用小功率直流無刷電機(jī)和步進(jìn)電機(jī),方便的實(shí)現(xiàn)單錠啟停控制。同時(shí),單錠的啟停,直接影響筒紗吸紗臂風(fēng)口的作用與否,同時(shí)影響空氣負(fù)壓大小和用量。...
電動機(jī)在運(yùn)轉(zhuǎn)中如果降低指令頻率,則電動機(jī)變?yōu)楫惒桨l(fā)電機(jī)狀態(tài)運(yùn)行,作為制動器而工作,這就叫作再生(電氣)制動。...
第一階段是傳統(tǒng)伺服系統(tǒng)的發(fā)展。早期的伺服系統(tǒng)采用的是開環(huán)控制,即輸出信號直接由輸入信號決定,沒有反饋機(jī)制進(jìn)行實(shí)時(shí)調(diào)節(jié)這種系統(tǒng)簡單、成本低,但對于精密控制要求較高的應(yīng)用來說,效果并不理想。...

梯形圖中繼電器元件的狀態(tài)切換只是PLC對存儲位的狀態(tài)數(shù)據(jù)的操作,如果PLC對常開觸頭等效的存儲位數(shù)據(jù)賦值為“1”,就完成動合操作過程,同樣如對常閉觸頭等效的存儲位數(shù)據(jù)賦值為“0”,就可完成動斷操作過程,切換操作過程沒有時(shí)間延時(shí)。...
上位機(jī)控制示意框圖 在一些復(fù)雜的系統(tǒng)中,上位機(jī)可能還會負(fù)責(zé)數(shù)據(jù)的處理、存儲和顯示,以及與其他系統(tǒng)的交互等任務(wù)。...
采用磁性槽楔代替原槽楔磁性槽楔主要降低異步電動機(jī)中的空載鐵損耗,空載附加鐵損耗是由齒槽效應(yīng)在電機(jī)內(nèi)引起的諧波磁通而在定子、轉(zhuǎn)子鐵芯中產(chǎn)生的。定子、轉(zhuǎn)子在鐵芯內(nèi)感生的高頻附加鐵損耗稱為脈振損耗。...

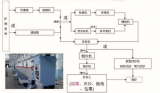
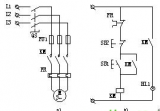
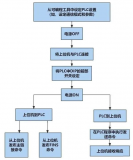
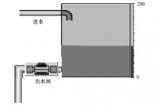
今天主要跟大伙分享一個(gè)關(guān)于實(shí)際案例,涉及PLC、變頻器,觸摸屏的水位控制項(xiàng)目,看一下整個(gè)流程怎么走,可以收藏備用!...
應(yīng)用此技術(shù)在紗織品種變化的情況下,不需要改變齒輪或皮帶輪,設(shè)備工藝轉(zhuǎn)速的改變只需要通過變頻器設(shè)定即可完成。 梳棉機(jī)老機(jī)在設(shè)計(jì)方面由于受到當(dāng)時(shí)的技術(shù)條件、設(shè)備制造成本,市場需要等因素的限制不可避免的存在著一些缺陷。...
伺服電機(jī)速度增益過大會導(dǎo)致控制系統(tǒng)不穩(wěn)定,出現(xiàn)過沖或者振蕩現(xiàn)象;伺服電機(jī)速度增益過小會導(dǎo)致控制系統(tǒng)響應(yīng)遲鈍,無法快速調(diào)整速度。因此,需要通過試驗(yàn)和調(diào)整來確定合適的速度增益,以保證控制系統(tǒng)的穩(wěn)定性。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




