 電子發燒友App
電子發燒友App


GPS 是英文Global Positioning System(全球定位系統)的簡稱,而其中文簡稱為“球位系”。GPS的空間部分是由24顆工作衛星組成,它位于距地表20200km的上空,均勻分布在6 個軌道面上(每個軌道面4 顆) ,軌道傾角為55°。此外,還有3 顆有源備份衛星在軌運行。
GPS模塊
設計采用u-blox公司的GPS接收模塊nr-86,該模塊體積小重量輕,集成高靈敏度、低功耗的NemeriX芯片方案于設計中。本模塊能快速定位, 1Hz導航更新頻率,并可以對16顆衛星進行同時跟蹤。支持WGS-84的數據協議。它接口簡單,TTL電平串口輸出NMEA-0183格式的數據,只須連接模塊的TX端與51單片機的RX端,另外單片機P1.0與模塊的RESET端相連,以控制模塊復位。本設計采用NMEA默認格式中的$GPRMC協議,是由于該協議精簡,信息覆蓋面廣,數據容易被單片機采集處理。
調制解調芯片MSM6882
在設計時,89S52單片機通過同步串口與該芯片相連,然后由芯片把信號調制到模擬信道,再將信號加載到對講機(PTT)上,由對講機實現無線傳輸。單片機CLK引腳的輸入時鐘周期應在0.42μs到1.35μs范圍內,通過可調電阻調節調制信號輸入到電臺的幅值。信號一路經信號限幅后送入MSM6882的AI引腳,另外一路經放大、檢波、幅值比較后送??????????????
入單片機,以作為載波檢測信號。當系統檢測到該信號時,可以采取延時發送的方式來避免同頻干擾和信道阻塞。
語音合成芯片XF1M01
語音合成芯片 XF1M01通過異步串口接收待合成的文本,它內含GB-2312漢字字庫,外接單支三極管驅動揚聲器,即可實現文本到聲音(TTS)的轉換,設計中音頻輸出通過功放再送給揚聲器,以獲得較大音量,適應戶外環境。只須送給它漢字的內碼(即16位二進制字符),即可讀出一字,多送多讀,因此對存放空間的要求要低,適合電子巡查系統的應用。芯片空閑時Ready端輸出低電平,因此將其連至單片機P3.2,單片機即可掃描該引腳,當芯片空閑時就通過異步串口給它發送數據。傳輸波特率由Baud_0、Baud_1兩個引腳決定,設計中采用的是9600bps。單片機的P1.1與芯片RESET端相連以控制芯片復位。
以往的保安巡查沒有太多設備,人均一個對講機,一條警棍。隨著GPS的出現,基站即總臺對每個保安的地理位置信息的掌握成為可能。即每個保安配備一套GPS定位設備,以及一套將自身位置信息發送給總臺的無線收發設備。由于給每個保安重新配備一套設備成本高昂,而且淘汰已有的對講機不夠現實,于是,將對講機作為已有的信道載體,便一舉兩得,只須對舊的對講機作局部電路的調整修改,就能既方便又實際地構筑前所未有的安全體系。

圖1 電子巡查系統應用
利用主板與各個功能模塊的結合組成移動智能終端。它包括MCU即單片機AT89S52、GPS接收模塊、模擬調制解調芯片MSM6882、液晶顯示模塊LCD1602、語音合成芯片XF1M01,見圖2。
移動智能終端完成正向GPS數據采集、處理和發送,以及反向對總臺命令進行接收、識別、執行。
其中GPS模塊一秒鐘輸出一次GPS信息,MCU將其收錄,并在顯示模塊上顯示自身經緯度和時間日期。然后通過調制解調芯片將數據加載到對講機然后無線傳輸給總臺,完成正向任務。
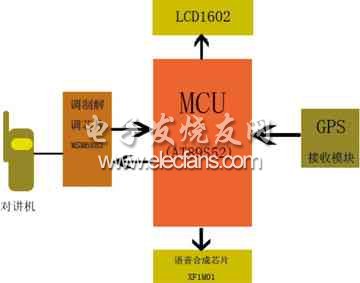
圖2 智能終端結構
接著會有大約半秒種時間段等待總臺命令,若收到總臺的命令,即根據數據幀判斷命令類型,提取相應數據,經MCU處理后執行相應的顯示操作和語音提示操作,完成反向任務。
當終端接收到目標命令信息并處理執行后,重新發送回總臺時前導碼改變以表示命令接收成功,使總臺作出相應處理。例如前導碼可以從“start”變成“start1”。
和以往功能單一,界面欠缺人性化的便攜式設備相比,這個GPS數據采集處理傳輸一體化智能終端有了功能的擴展。首先,每個保安可以在LCD顯示屏上看到自己的所在經緯度、時間日期等信息,給保安一個直觀,清晰的地理位置感。另外,可以實時接收來自總臺的命令信息,經MCU處理后,將總臺派遣前往的地點經緯度現實在LCD屏幕與自身位置加以對比,實現信息的透明化。另一個改進是語音提示智能化以及角度偏置的計算,通過接收總臺發出的目標派遣地點經緯度,與自身位置比較后,明確清晰地提示保安該往什么方向走多遠。系統終端采用51系列的單片機作MCU。用調制解調芯片把信號加載到對講機實現無線傳輸代替獨立的無線通信模塊。液晶屏選取簡單易用的LCD1602。方案大大降低成本,而且穩定可靠。
系統必須制定一個合理的流程(圖3)以便充分發揮MCU對數據采集、處理、傳輸等功能。
為了使系統工作盡量的穩定,功能盡量的多(上行下行都有各自的處理執行時間),以及數據更新盡量的快(GPS數據一秒一幀,系統處理不夠用可將其改成兩秒一幀),系統必須制定一個合理的時序以便統一分配時間。
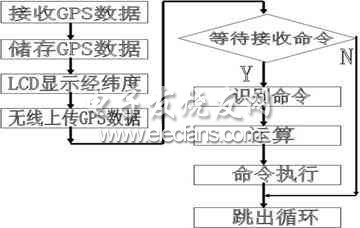
圖3 終端工作流程
MCU控制各個功能模塊工作可參考圖4的時間安排。

圖4 終端MCU控制時序分配
如圖4所示,在1秒時隙內,先接收GPS信號(圖中GPS表示),經采集后再發送給調制芯片(圖中Send_data),然后控制LCD顯示(圖中LCD),顯示完畢后開始等待接收總臺命令信號,等待直至下一秒的到來,相隔大約0.6秒。若下一秒到來前沒有命令信號則轉入下一個循環;若下一秒到來前有接收到命令信號則進入接收程序(圖中Receive_data),經過短暫的數據處理時間段(圖中process)后再啟動顯示(圖中LCD2),然后驅動語言芯片發音(圖中Speak)。成功收到命令信息后,下一周期的“Send_data”將改變前導碼以反饋給總臺。

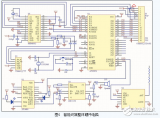
圖5? 智能終端整體硬件電路
MCU
本設計采用AT89S52作為MCU,其中P0口與P1口的2,3,4控制LCD1602;P1口的5,6,7作為同步串口控制調制解調芯片MSM6882;串口的RX接收GPS數據,TX發送語音數據(見圖5)。
設計了一個嵌入式智能移動定位終端,經過實物調試成功。巧妙利用低成本硬件實現了GPS的信號采集、處理、傳輸等的功能。設計通過低成本的設備改良制作出了智能移動終端,實現總臺對保安位置等信息的掌握,監控。本設計巧妙地運用原有對講機網絡作為數字通信媒介,使得成本更低應用更方便。另外語音合成文本芯片的運用簡化了硬件的開發。










 工商網監
工商網監
評論