 電子發燒友App
電子發燒友App


作者: Philip Karantzalis,高級應用工程師和Frances De La Rama,產品應用工程師
?
問題:
為何要組合使用低通濾波器(LPF)和模數轉換器(ADC)驅動器?
?
?
答案:
為了減小模擬信號鏈的尺寸,降低其成本,并提供ADC抗混疊保護(ADC采樣頻率周圍頻段中的ADC輸入信號不受數字濾波器保護,必須由模擬低通濾波器(LPF)進行衰減)。20 V p-p LPF驅動器一般用于工業、科技和醫療(ISM)設備中,該設備必須使用具有更低滿量程輸入的高速ADC對傳統的20 V p-p信號范圍進行數字化處理。
?
簡介
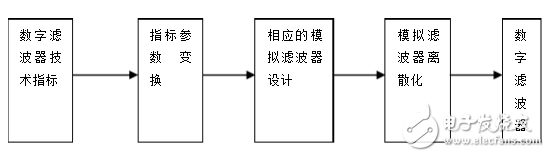
通過驅動ADC實現優化的混合信號性能,這是一大設計挑戰。圖1所示為標準的驅動器ADC電路。在ADC采集期間,采樣電容將反沖RC濾波器中指數衰減的電壓和電流。混合信號ADC驅動器電路的最佳性能受到多個變量影響。驅動器的建立時間、RC濾波器的時間常數、驅動阻抗,以及ADC采樣電容的反沖電流在采樣時間內相互作用,導致產生采樣誤差。采樣誤差隨著ADC位數、輸入頻率和采樣頻率的增大而增大。
?
標準ADC驅動器具有大量實驗數據樣本,可用于可靠的設計流程。但缺乏實驗數據來引導進行驅動ADC的低通濾波器設計。本文介紹集成模擬低通濾波、信號壓縮和ADC驅動器的LPF驅動器電路(參見圖2)。
?
表1列出了圖2所示電路的性能變量。下方的實驗室數據和分析旨在引導說明,給出圖2所示的電路的時間和頻率響應限值。
?
表1.圖2所示電路的性能變量
| LPF驅動器 | RC濾波器 | ADC |
| –3 dB帶寬、阻帶衰減、建立時間、噪聲、THD | 電阻值、RC時間常數 | 采樣頻率、位數、采樣時間、SNR、THD |
?
實驗室數據和分析
信噪比(SNR)和總諧波失真(THD)是衡量系統動態性能的兩個重要參數。能否實現最佳性能,取決于ADC和信號調理級的組合,在本文中,后者包括三階低通濾波器和單端至差分轉換器。圖2所示的LPF驅動器電路的–3 dB帶寬和建立時間會有所不同,有關SNR和THD的測量值,請參見表2至表5。本文將會探討受測變量和這些變量對系統性能的影響。
?
低通濾波器–3 dB帶寬
比較信號帶寬為1 MHz與2 MHz和0.5 MHz時系統的性能。當–3 dB點分別為558 kHz、1 MHz、和2.3 MHz,其性能如表2所示。將截止頻率降低至558 kHz,LPF噪聲帶寬隨之降低,但SNR提高。將截止頻率增大至1 MHz或2.3 MHz,LPF驅動器建立時間縮短,THD降低。
?
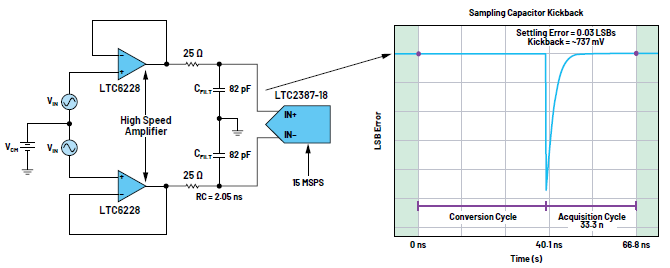
圖1.標準ADC驅動器和RC濾波器。
?
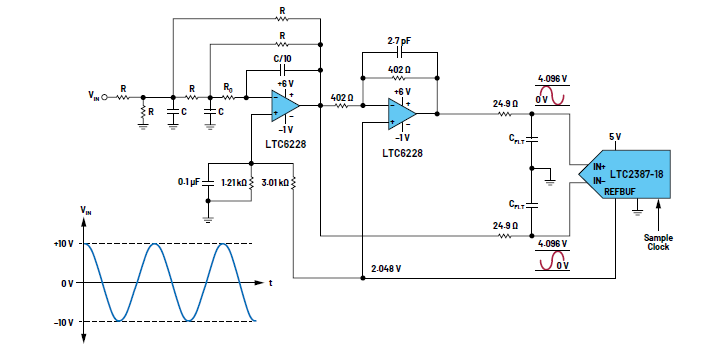
圖2.LPF驅動器和ADC電路。
?
表2.R = 750 Ω時三種截止頻率對應的LPF驅動器性能
| VIN (V p-p) | FIN (kHz) | -3 dB頻率 | RQ |
LPF 驅動器C |
LPF 驅動器R |
SNR | THD |
| ? | ? | 558 kHz | ? | 2700 pF | ? | 90 dB | -98 dB |
| 20 | 2 | 1 MHz | 150 ? | 1500 pF | 750 ? | 90 dB | -103 dB |
| ? | ? | 2.21 MHz | ? | 680 pF | ? | 88 dB | -106 dB |
?
更改圖2所示的R或C可以更改截止頻率。使用C電容來設置截止頻率時,LPF驅動器THD更低;R電阻值降低,有助于略微改善SNR;如表3所示。
?
表3.R = 412 Ω時三種截止頻率對應的LPF驅動器性能
| VIN (V p-p) | FIN (kHz) | -3 dB頻率 | RQ |
LPF 驅動器C |
LPF 驅動器R |
SNR | THD |
| ? | ? | 580 kHz | ? | 4700 pF | ? | 91 dB | -98 dB |
| 20 | 2 | 1 MHz | 150 ? | 2700 pF | 412 ? | 90 dB | -97 dB |
| ? | ? | 2.25 MHz | ? | 1200 pF | ? | 89 dB | -99 dB |
?
設置RQ電阻(圖2)
LPF的RQ電阻可設置時間響應。RQ越高,過沖越大,建立時間越長。RQ越低,過沖越小,建立時間越短。圖3顯示使用150 ?和75 ? RQ電阻時對應的LPF瞬態響應。我們測試了使用不同的RQ時LPF驅動器的性能,測試結果如表4所示。
?

圖3.不同的RQ值對應的過沖和建立時間。
?
表4.不同的RQ值對應的LPF驅動器性能
| VIN (V p-p) | 采樣速率(MSPS) | -3 dB頻率 | RQ |
LPF 驅動器C |
LPF 驅動器R |
SNR | THD |
| 20 | 10 | 558 kHz | 150 ? | 2700 pF | 750 ? | 90 dB | -98 dB |
| 75 ? | 90 dB | -97 dB | |||||
| 1 MHz | 150 ? | 1500 pF | 89 dB | -102 dB | |||
| 75 ? | 89 dB | -100 dB | |||||
| 2.3 MHz | 150 ? | 680 pF | 88 dB | -106 dB | |||
| 75 ? | 88 dB | -106 dB |
?
根據實際測量得出的數據,使用75 ?和150 ? RQ對SNR和THD性能沒有明顯影響,只是影響過沖和建立時間的一個因素。
?
ADC采樣速率
表5中的數據顯示,如果使用LTC2387-18,在10 MSPS時系統的THD性能低于15 MSPS時(在10 MSPS時,圖2中的RC驅動器電容C3和C4的值為180 pF)。
?
注:在10 MSPS時,LTC2387-18和LTC2386-18的采樣時間分別為61 ns和50 ns。
?
表5.采樣速率為10 MSPS和15 MSPS時的LPF驅動器性能
| VIN (V p-p) | 采樣速率(MSPS) | -3 dB頻率 | RQ |
LPF 驅動器C |
LPF 驅動器R |
SNR | THD |
| 20 | 15 | 1 MHz | 150 ? | 1500 pF | 750 ? | 88 dB | -96 dB |
| 10 | 89 dB | -101 dB | |||||
| 15 | 2.3 MHz | 75 ? | 680 pF | 88 dB | -93 dB | ||
| 10 | 88 dB | -106 dB |
?
RC濾波器
驅動器和ADC之間的RC濾波器用于限制帶寬,確保實現寬帶寬低噪聲,且實現更優的信噪比。RC數值決定–3 dB截止頻率。降低R有時可能導致響鈴振蕩和不穩定。增大R會增大采樣誤差。使用更低的C值,會導致更高的電荷反沖,但充電時間更快。使用更高的C值,可以降低電荷反沖,但充電時間會變慢。此外,設置RC值是確保在給定的采樣時間內獲取穩定樣本的關鍵。使用數據手冊的推薦值和精密ADC驅動器工具給出的建議值會是一個非常不錯的起點。
?
精密ADC驅動器工具是一款綜合工具,可以幫助預測在驅動器和ADC之間使用不同的RC值系統的性能。可以使用這款工具檢查的參數包括電荷反沖、采樣誤差和采樣時間。
?
使用25 ?和180 pF RC實現更低的–3 dB截止頻率時,輸入信號建立時間和電荷反沖會受到影響。要實現更低的–3 dB截止頻率,并確保輸入信號在采集時間內正確建立,我們可能需要使用更低的采樣速率。根據LTC2387-18數據手冊,采樣時間通常是周期時間減去39 ns。在15 MSPS使用LTC2387-18時,采樣時間為27.67 ns,在10 MSPS使用此器件時,采樣時間為61 ns。
?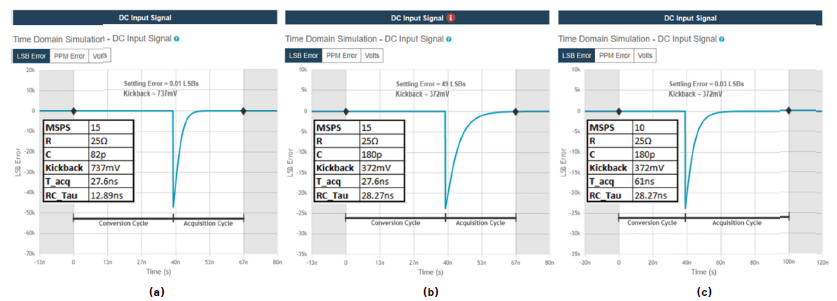
圖4.使用不同采樣速率時的電荷反沖、RC_Tau、采樣時間:(a) 15 MSPS采樣速率,LTC2387-18使用建議的RC值(25 Ω和82 pF),(b) 15 MSPS采樣速率,LTC2386-18使用建議的RC值(25 Ω和180 pF),(c) 10 MSPS采樣速率,LTC2386-18使用建議的RC值(25 Ω和180 pF)。
?
借助精密ADC驅動器工具,圖4a至4c匯總列出了使用不同的RC值時對應的反沖差值和RC時間常數(Tau),以及采樣速率為10 MSPS和15 MSPS時的采樣時間。圖4a顯示LTC2387-18在15 MSPS采樣速率下,使用推薦RC值(25 ?和82 pF)時的建立響應。圖4b顯示在C為180 pF時,得出的RC時間常數更高,這導致在15 MSPS采樣速率、27.6 ns采樣時間內輸入信號無法建立。圖4c使用與圖4b相同的RC值(25 ?和180 pF),但在使用10 MSPS采樣速率、采樣時間增加至61 ns之后,信號能夠建立。
?
LPF驅動器電阻選擇
可以通過更改R或C來實現LPF驅動器的–3 dB截止頻率。電阻噪聲是系統總噪聲的組成部分。根據噪聲計算公式,從理論上來說,降低電阻值可以降低電阻噪聲。為了進行驗證,我們嘗試了兩個不同的電阻值作為LPF驅動器R,分別是750 ?和412 ?。從理論來說,R更低時得出的SNR應該更佳,但從實際獲得的數據來看,如表2和表3所示,SNR并無很大改善,相反,這會對THD性能產生更大影響。
?
LPF電阻(圖1中的R)越低,放大器所需的電流越大。使用更低的電阻值時,運算放大器的輸出電流高于最大線性驅動電流。
?
放大器驅動器選擇
在選擇要使用的ADC驅動器時,實現器件最佳性能所對應的規格至關重要。我們使用兩個ADC驅動器來收集數據,分別是ADA4899-1和LTC6228。這些ADC驅動器非常適合用于驅動LTC2387-18,后者用于進行實驗室測量。在選擇ADC驅動器時考慮的一些規格包括帶寬、電壓噪聲、諧波失真和電流驅動能力。根據已完成的測試,從THD和SNR這兩個方面來看,ADA4899-1和LTC6228的性能差異可以忽略。
?
LPF設計和應用指南
圖5顯示LPF電路。5個相同電阻(R1至R5)、1個用于調節LPF時間響應的電阻(RQ)、2個相同的接地電容(C1和C2),以及1個數值為接地電容1/10的反饋電容(C3),這些器件構成了LPF無源組件(±1%電阻和±5%電容)。
?
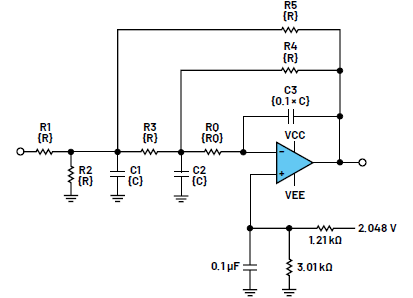
圖5.LPF電路。
?
簡單的LPF設計流程(注1)
R1至R5 = R,C1和C2 = C。
?
要盡量降低失真,電阻R1至R5的值必須在600 ?至750 ?范圍內。
?
設置R = 750 ?
C = 1.5E9/f3 dB(最接近標準的5%電容pF),f3 dB為LPF –3 dB頻率(注2)
例如:如果f3 dB為1 MHz,那么C = (1.5E9)/(1E6) = 1500 pF
C3 = C/10
RQ = R/5或R/10(注3和4)
?
注1.簡單的濾波器設計只需要一個計算器,無需使用非線性s域公式。
?
注2.如果R = 619 ?,那么C = 1.8E9/f3 dB,f3 dB為LPF –3 dB頻率。
?
注3.RQ = R/5,用于實現最大阻帶衰減,RQ = R/10,用于實現低過沖和快速建立時間。
?
采用RQ/5和RQ/10時,在10× f–3 dB時,阻帶衰減分別為–70 dB和–62 dB。
?
注4.如果RQ = R/10,–3 dB頻率比RQ = R/5時低7%,也就是說,R1至R5等于RQ/5時R的0.93。
?
注5.LPF驅動器差分輸出至ADC輸入的PCB線路距離為1'’或更低。
?
注6.LPF運算放大器的VCC和VEE分別為6 V和–1 V,輸出線性電壓擺幅為0 V至4.098 V。
?
結論
根據表2至表5的SNR和THD數據,我們可以了解圖2所示電路的性能。通過增大電容來降低LPF帶寬,這會增大SNR(降低LPF噪聲帶寬)。LPF帶寬越低,失真程度越高(因為LPF建立時間比實現最低采樣誤差所需的時間長)。此外,如果LPF電阻值太低,THD會隨之降低,因為LPF運算放大器需要驅動反饋電阻和反相運算放大器輸入電阻(運算放大器輸出電流更高時,失真程度降低)。
?
LTC2387-18 ADC采用10 MSPS采樣頻率時,LPF通帶必須為1 MHz或高于1 MHz,以盡可能降低THD。將LPF設置為1 MHz,是對SNR、THD和足量ADC混疊抑制的任意妥協。
?
設計參考:ADI的精密ADC驅動器工具
精選器件
?
運算放大器
| 產品型號 | VOS (V)最大值 | IBIAS (A)最大值 | GBP (Hz)典型值 | VNOISE (V/√Hz)典型值 | THD 2 V p-p,RL = 1k | VS范圍最小值/最大值(V) |
| ADA4899-1 | 35 μV | -12 μA | 600 MHz | 1 nV/√Hz | -117 dBc(1 MHz) | ±5 V |
| LTC6228/ LTC6229 | 20 μV | -16 μA | 890 MHz | 0.88 nV/√Hz | -120 dBc(1 MHz) | ±5 V |
?
模數轉換器
| 產品型號 |
分辨率 (位) |
最大值FS |
輸入類型 (單端、差分) |
VIN范圍 (VMIN/VMAX) |
SNR (dB) |
INL (LSB) |
數據輸出接口 |
| LTC2387 | 18 | 15 MSPS | 單端、差分 | –VREFBUF至+VREFBUF | 95.7 | ±0.6 | 串行LVDS接口 |
?









 工商網監
工商網監
評論