 電子發(fā)燒友App
電子發(fā)燒友App


1 引言
GPS 系統(tǒng)由多顆衛(wèi)星組成,運(yùn)行在受大氣影響甚微的高軌道上,可以用來(lái)授時(shí)、測(cè)距、測(cè)量位置、測(cè)量運(yùn)動(dòng)載體的速度及方向。如今GPS 接收設(shè)備的應(yīng)用已經(jīng)很廣泛,但一般都是單個(gè)GPS 接收設(shè)備工作,只有在一些專業(yè)設(shè)備上才采用多個(gè)GPS 接收設(shè)備協(xié)同工作,以獲取高精度的位置、速度、方向等。但這些設(shè)備都很專業(yè),價(jià)格昂貴,一般人很少有機(jī)會(huì)接觸和使用。本文中討論一種簡(jiǎn)單易行,低成本的多GPS 接收設(shè)備協(xié)同工作,以獲取載體在運(yùn)動(dòng)狀態(tài)中方向的定向儀的實(shí)現(xiàn)。
2 GPS 定向
GPS 可以用來(lái)確定運(yùn)動(dòng)載體瞬時(shí)速度的大小及方向,其原理是利用多普勒原理使用無(wú)線電信號(hào)來(lái)進(jìn)行測(cè)定。由于衛(wèi)星與運(yùn)動(dòng)的載體之間存在相對(duì)運(yùn)動(dòng),根據(jù)多普勒頻移原理,衛(wèi)星播發(fā)的信號(hào)頻率在運(yùn)動(dòng)載體接收時(shí)會(huì)產(chǎn)生頻移,通過(guò)觀測(cè)這個(gè)頻移量可得到速度的數(shù)值及方向。
市面上常見(jiàn)的普通GPS 都支持NMEA 數(shù)據(jù)通訊協(xié)議,所謂“NMEA 協(xié)議”是由美國(guó)國(guó)家海洋電子協(xié)會(huì)(NMEA- The National Marine Electronics Association) 制定的一套通訊協(xié)議,是為了在不同的GPS 導(dǎo)航設(shè)備中建立統(tǒng)一的BTCM(海事無(wú)線電技術(shù)委員會(huì))標(biāo)準(zhǔn)。GPS 接收設(shè)備根據(jù)NMEA- 0183 協(xié)議的標(biāo)準(zhǔn)規(guī)范,將位置、速度等信息通過(guò)串口傳送到PC 機(jī)、PDA 等設(shè)備。
NMEA- 0183 協(xié)議定義的語(yǔ)句非常多,但是常用的或者說(shuō)兼容性最廣的語(yǔ)句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL 等,其中,我們只給出重點(diǎn)使用的常用NMEA- 0183 語(yǔ)句的字段定義解釋:
(1)$GPGGA:包含當(dāng)前點(diǎn)位的位置信息
例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F
字段0:$GPGGA,語(yǔ)句ID,表明該語(yǔ)句為Global PositioningSystemFix Data(GGA)GPS 定位信息
字段1:UTC 時(shí)間,hhmmss.sss,時(shí)分秒格式
字段2:緯度ddmm.mmmm,度分格式(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段3:緯度N(北緯)或S(南緯)
字段4:經(jīng)度dddmm.mmmm,度分格式(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段5:經(jīng)度E(東經(jīng))或W(西經(jīng))
字段6:GPS 狀態(tài),0= 未定位,1= 非差分定位,2= 差分定位,3= 無(wú)效PPS,6= 正在估算
字段7:正在使用的衛(wèi)星數(shù)量(00 - 12)(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段8:HDOP 水平精度因子(0.5 - 99.9)
字段9:海拔高度(- 9999.9 - 99999.9)
字段10:地球橢球面相對(duì)大地水準(zhǔn)面的高度
字段11:差分時(shí)間(從最近一次接收到差分信號(hào)開(kāi)始的秒數(shù),如果不是差分定位將為空)
字段12:差分站ID 號(hào)0000 - 1023 (前導(dǎo)位數(shù)不足則補(bǔ)0,如果不是差分定位將為空)
字段13:校驗(yàn)值
(2)$GPVTG:包含速度及方向信息
例:$GPVTG,89.68,T,,M,0.00,N,0.0,K*5F
字段0:$GPVTG,語(yǔ)句ID,表明該語(yǔ)句為T(mén)rack MadeGood and Ground Speed(VTG)地面速度信息
字段1:運(yùn)動(dòng)角度,000 - 359,(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段2:T= 真北參照系
字段3:運(yùn)動(dòng)角度,000 - 359,(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段4:M= 磁北參照系
字段5:水平運(yùn)動(dòng)速度(0.00)(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段6:N= 節(jié),Knots
字段7:水平運(yùn)動(dòng)速度(0.00)(前導(dǎo)位數(shù)不足則補(bǔ)0)
字段8:K= 公里/ 時(shí),km/h
字段9:校驗(yàn)值
本文中討論的定向儀就是使用上述信息來(lái)實(shí)現(xiàn)定向的,具體實(shí)現(xiàn)原理如下所述。將兩個(gè)GPS 接收設(shè)備安放在一定長(zhǎng)度的剛體上即可進(jìn)行該剛體的定向,例如圖1 中為了測(cè)定船載航行時(shí)窗體的航行而分別在船頭和船尾放置了GPS 接收設(shè)備:
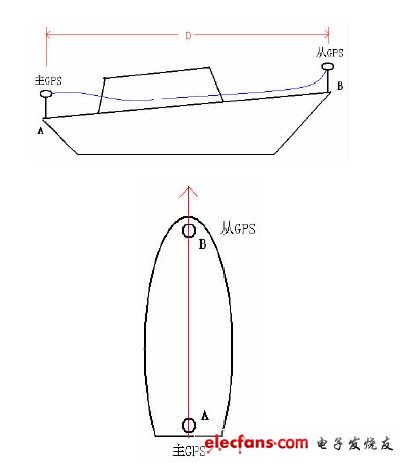
圖1 定向儀的使用
當(dāng)船體運(yùn)動(dòng)時(shí),由于主GPS 設(shè)備與從GPS 設(shè)備都可以得到各自的速度大小及方向,所以可以求出船體的運(yùn)動(dòng)狀態(tài),如圖2 所示,由于GPS 設(shè)備可以獲取A 點(diǎn)及B 點(diǎn)的瞬時(shí)速度及方向,而船體可以視為剛體,則可以得到與真北方向或者磁北方向的夾角α、β(可以選擇真北也可以選擇磁北,不過(guò)A、B兩點(diǎn)要統(tǒng)一),將角度與方向分解在北向和東向上,疊加解算后即可得到船體的運(yùn)動(dòng)狀態(tài):
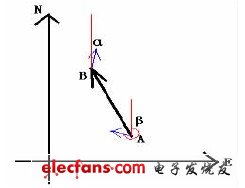
圖2 船體運(yùn)動(dòng)狀態(tài)的計(jì)算
3 GPS定向儀的實(shí)現(xiàn)
如圖3 所示,GPS 定向儀由GPS 衛(wèi)星信號(hào)接收天線、天線連接電纜、GPSOEM板卡、單片機(jī)組成,其中供電電源為12VDC 蓄電池:
圖3 GPS定向儀硬件組成
其電路原理如圖4 所示:
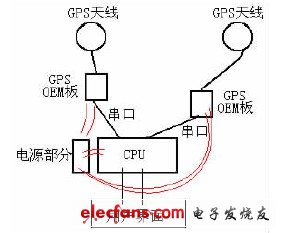
圖4 電路原理
其中,A、B 兩個(gè)GPS 設(shè)備把數(shù)據(jù)輸出到CPU,CPU 通過(guò)軟件計(jì)算出當(dāng)前的姿態(tài)后實(shí)時(shí)的通過(guò)用戶界面顯示給用戶。
4 結(jié)論
本文中討論的簡(jiǎn)易GPS 定向儀,不需要使用專業(yè)GPS 設(shè)備,而通過(guò)簡(jiǎn)單易行的方法和解算即可得到載體的運(yùn)動(dòng)狀態(tài),當(dāng)主從GPS 設(shè)備間的距離大于1 米后,精度會(huì)隨著它們之間距離的增加而有所提高。事實(shí)上,這個(gè)方法如果將GPS 設(shè)備升級(jí)為帶有載波相位輸出的專業(yè)GPS 測(cè)量設(shè)備,并且將主從GPS 設(shè)備間的距離作為已知條件進(jìn)行靜態(tài)高精度基線解算的話,可以把定向儀的精度明顯的提升到專業(yè)設(shè)備的水準(zhǔn),與目前市面上的專業(yè)定向、定姿態(tài)設(shè)備的原理是相同的。
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論