 電子發(fā)燒友App
電子發(fā)燒友App


什么是主動(dòng)雷達(dá)尋的或雷達(dá)制導(dǎo)的空對(duì)空導(dǎo)彈系統(tǒng)?
有源雷達(dá)尋的系統(tǒng)由地面雷達(dá)系統(tǒng)與大尺寸天線組成, 帶有多個(gè)雷達(dá)制導(dǎo)導(dǎo)彈外殼的主動(dòng)雷達(dá)發(fā)射臺(tái)和 主動(dòng)雷達(dá)導(dǎo)彈本身。地面雷達(dá)可以是固定的,也可以是移動(dòng)的。通常安裝在現(xiàn)場(chǎng)的固定雷達(dá)稱為空中監(jiān)視雷達(dá)。雷達(dá)制導(dǎo)導(dǎo)彈裝有雷達(dá)收發(fā)器,不像半主動(dòng)雷達(dá)尋的導(dǎo)彈 其中僅包含雷達(dá)接收器。收發(fā)器是指由兩個(gè)發(fā)射器組成的設(shè)備 和接收器功能。
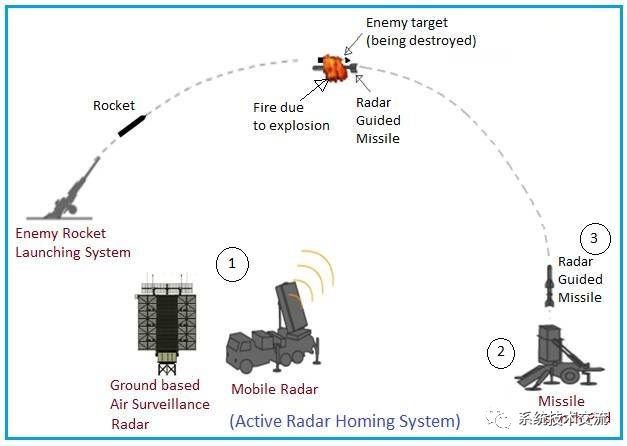
該圖描述了有源雷達(dá)尋的系統(tǒng)組件。如圖所示,它由三部分組成,即固定或移動(dòng)雷達(dá)、導(dǎo)彈發(fā)射臺(tái)和雷達(dá)制導(dǎo)導(dǎo)彈。讓我們了解主動(dòng)雷達(dá)尋的系統(tǒng)的工作原理。
? 地面雷達(dá)站連續(xù)點(diǎn)亮空氣中的電磁能,從而得到 當(dāng)目標(biāo)在其范圍內(nèi)時(shí),從目標(biāo)反射。
? 一旦地面雷達(dá)系統(tǒng)檢測(cè)到遠(yuǎn)程目標(biāo),它就會(huì)向?qū)棸l(fā)射臺(tái)提供信號(hào) 向目標(biāo)釋放空對(duì)空導(dǎo)彈。
? 一旦雷達(dá)制導(dǎo)導(dǎo)彈到達(dá)目標(biāo)附近,它就會(huì)利用機(jī)載雷達(dá)收發(fā)器來(lái) 微調(diào)其射程以更接近目標(biāo)并摧毀它。
? 為了取得成功,空對(duì)空雷達(dá)制導(dǎo)導(dǎo)彈在目標(biāo)附近爆炸,摧毀所有目標(biāo) (即火箭)在其附近或直接擊中目標(biāo)。
主動(dòng)雷達(dá)尋的或雷達(dá)制導(dǎo)導(dǎo)彈的好處或優(yōu)勢(shì)
以下是主動(dòng)雷達(dá)尋的或雷達(dá)制導(dǎo)導(dǎo)彈的優(yōu)點(diǎn)或優(yōu)勢(shì):
?與地面雷達(dá)制導(dǎo)的陸對(duì)空導(dǎo)彈相比,它更準(zhǔn)確。
?由于內(nèi)置雷達(dá)收發(fā)器,它非常接近目標(biāo)。因此,它更有可能摧毀目標(biāo)。
?一旦發(fā)射,它將負(fù)責(zé)摧毀目標(biāo)本身,不再需要發(fā)射平臺(tái)。這為啟動(dòng)提供了時(shí)間 平臺(tái)跟蹤其他目標(biāo)。
有源雷達(dá)尋的缺點(diǎn)或缺點(diǎn)
以下是有源雷達(dá)尋的缺點(diǎn)或缺點(diǎn):
?與半主動(dòng)雷達(dá)尋的系統(tǒng)相比,由于使用雷達(dá)收發(fā)器,它更昂貴。
?由于使用電池進(jìn)行操作,它具有較低的ERP(有效輻射功率)和有限的覆蓋范圍。
?沒有地面雷達(dá)系統(tǒng)的幫助,擊中遠(yuǎn)程目標(biāo)是不夠的。
半主動(dòng)、被動(dòng)和主動(dòng)雷達(dá)尋的導(dǎo)彈的區(qū)別
雷達(dá)尋的制導(dǎo)是防空導(dǎo)彈最常用的制導(dǎo)系統(tǒng)形式。根據(jù)其工作操作,有三種類型的雷達(dá)尋的導(dǎo)彈系統(tǒng) 即半主動(dòng)、被動(dòng)和主動(dòng)。
半主動(dòng)雷達(dá)尋的

圖-1描述了半主動(dòng)雷達(dá)尋的正常工作操作。以下是半主動(dòng)雷達(dá)尋的的特點(diǎn)。
?它僅使用接收器,其中目標(biāo)被雷達(dá)或其他外部光源照射。
? 來(lái)自目標(biāo)的反射能量由安裝在導(dǎo)彈上的接收器接收。
?與接收器連接的計(jì)算機(jī)用于確定 目標(biāo)的相對(duì)軌跡。導(dǎo)彈系統(tǒng)使用這些信息來(lái)攔截 準(zhǔn)確定位。
? 用于長(zhǎng)空對(duì)空和地對(duì)空導(dǎo)彈系統(tǒng)。
? 用于“全天候”制導(dǎo)系統(tǒng) 防空系統(tǒng)。
示例:
RSAF 使用的第一代 SAM
主動(dòng)雷達(dá)尋的
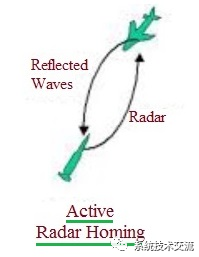
圖-2描述了有源雷達(dá)尋的正常工作操作。以下是主動(dòng)雷達(dá)尋的特色。
? 它傳輸能量并接收反射的能量。與半主動(dòng)不同,上面是由導(dǎo)彈本身完成的,因?yàn)樗瑫r(shí)容納發(fā)射器和 接收器部件。
? 該雷達(dá)尋的系統(tǒng)不需要外部源。
示例:
? AMRAAM 空對(duì)空導(dǎo)彈 ? 飛魚反艦導(dǎo)彈
AMRAAM AIM-120是主動(dòng)和半主動(dòng)歸位的組合。它支持約50公里的中程。
無(wú)源雷達(dá)尋的

圖-3描述了無(wú)源雷達(dá)尋的正常工作操作。以下是無(wú)源雷達(dá)尋的特色。
? 它使用來(lái)自目標(biāo)的熱輻射。導(dǎo)彈正在使用熱能來(lái)確定目標(biāo)的參數(shù)。
? 它獨(dú)立于任何外部指導(dǎo)系統(tǒng)。
? 它只接收信號(hào),不能傳輸類似于半主動(dòng)雷達(dá)尋的系統(tǒng)信號(hào)。
示例:
? RSAF 部署的米斯特拉爾是一種被動(dòng)紅外尋的制導(dǎo)系統(tǒng)。
? AIM9L/M 無(wú)源紅外尋的導(dǎo)引頭
? 可以輕松探測(cè)到半主動(dòng)和主動(dòng)尋的導(dǎo)彈。
? 被動(dòng)尋的導(dǎo)彈難以探測(cè),更容易打破鎖定。
AESA雷達(dá)和PESA雷達(dá)的區(qū)別 |AESA 雷達(dá)與 PESA 雷達(dá)
比較了AESA雷達(dá)與PESA雷達(dá),并提到了AESA雷達(dá)和PESA雷達(dá)之間的區(qū)別。AESA 代表有源電子掃描陣列,而 PESA 代表無(wú)源電子掃描陣列。
PESA雷達(dá)
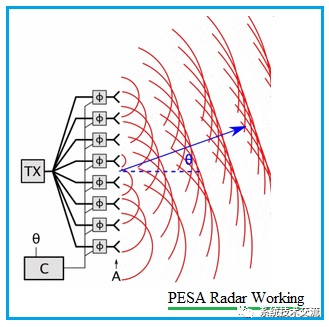
PESA雷達(dá)使用通用的共享射頻源,其中信號(hào)使用以下命令進(jìn)行修改 數(shù)控移相器模塊。
以下是PESA雷達(dá)的特點(diǎn)。
? 如圖-1所示,它使用單個(gè)發(fā)射器/接收器模塊。
? PESA雷達(dá)產(chǎn)生無(wú)線電波束,可以電子控制 在不同的方向。
? 這里的天線元件與單個(gè)發(fā)射器/接收器接口。這里的PESA與AESA不同,AESA使用單獨(dú)的發(fā)送/接收模塊 每個(gè)天線元件。所有這些都由計(jì)算機(jī)控制,如下所述。
? 由于使用頻率單一,極有可能 被敵方射頻干擾器干擾。
?掃描速度慢,只能跟蹤單個(gè)目標(biāo)或 一次處理單個(gè)任務(wù)。
AESA 雷達(dá)
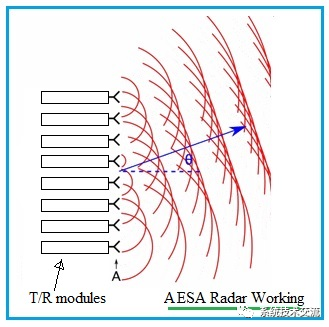
如前所述,AESA使用電子控制陣列天線 其中無(wú)線電波束可以電子控制以指向 在不同方向上相同,無(wú)需移動(dòng)天線。它被認(rèn)為是PESA雷達(dá)的高級(jí)版本。
AESA 使用許多單獨(dú)的小型發(fā)送/接收 (TRx) 模塊。
以下是AESA雷達(dá)的特點(diǎn)。
? 如圖-2所示,它使用多個(gè)發(fā)射器/接收器模塊。
? 多個(gè)發(fā)射/接收模塊與多個(gè)天線接口 稱為陣列天線的元件。
? AESA雷達(dá)同時(shí)產(chǎn)生不同無(wú)線電頻率的多個(gè)波束。
? 由于具有在寬范圍內(nèi)產(chǎn)生多個(gè)頻率的能力 范圍,它被敵方射頻干擾器干擾的可能性最小。
?它具有快速的掃描速率,可以跟蹤多個(gè)目標(biāo)或多個(gè)任務(wù)。
有關(guān)更多信息,請(qǐng)參閱 AESA 雷達(dá)框圖。
以下是現(xiàn)代PESA和AESA雷達(dá)類型之間的相似之處。
? 現(xiàn)代PESA和AESA通常都是脈沖雷達(dá)。
? 現(xiàn)代PESA和AESA都是頻率捷變和頻率跳躍的 在不同時(shí)間的不同頻率。
?兩者都可以有窄帶和寬帶模式。
? 兩者都可用于ECM,被動(dòng)掃描,波束成形等。
單基地雷達(dá)與雙基地雷達(dá)-單基地雷達(dá)和雙基地雷達(dá)的區(qū)別
單基地雷達(dá)
圖-1描繪了單基地雷達(dá)框圖。如圖所示,它使用相同的天線進(jìn)行發(fā)射和接收。由于兩個(gè)方向都使用單個(gè)天線,因此需要雙工器將發(fā)射鏈與接收鏈分開,并且 反之亦然。
單基地雷達(dá)方程表示如下:
PR= ( pt* g2* λ2*σM)/((4*π)3*d4*Lt*Lr*Lm)
其中,
PR=接收天線接收的總功率
G =天線增益
λ = 波長(zhǎng) = c/頻率,其中 c = 3 x 108
pt= 峰值發(fā)射功率
d = 雷達(dá)與目標(biāo)
之間的距離 Lt=發(fā)射機(jī)損耗
Lr=接收器損耗
Lm=中等損失
σM= 目標(biāo)的雷達(dá)橫截面。
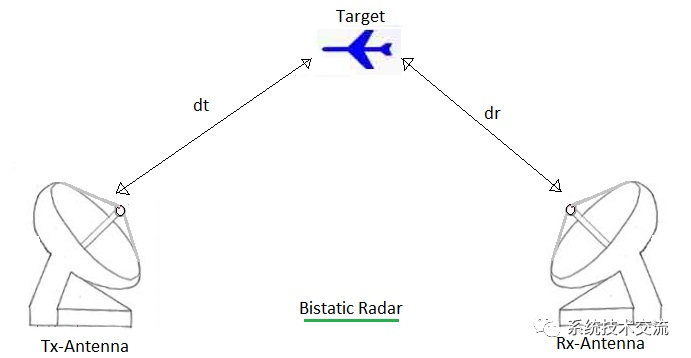
雙基地雷達(dá)

圖-2描繪了雙基地雷達(dá)框圖。如圖所示,它使用兩個(gè)獨(dú)立的天線作為發(fā)射器和接收器,并且位于不同的位置。
示例:CW雷達(dá)可用作雙基地雷達(dá)以及單基地雷達(dá)(當(dāng)天線之間的距離非常小時(shí))。
雙基地雷達(dá)方程表示如下:
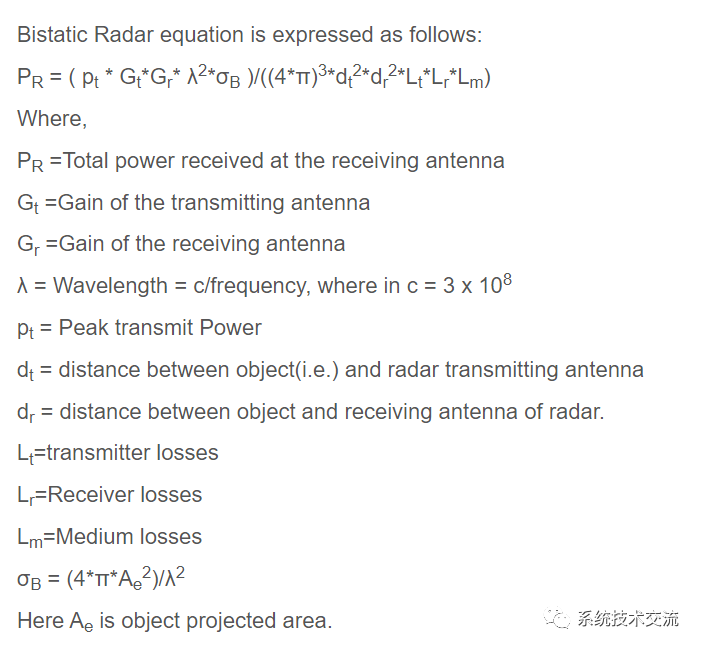
其中,
PR=接收天線接收的總功率
Gt=發(fā)射天線增益
Gr=接收天線的增益
λ = 波長(zhǎng) = c/頻率,其中 c = 3 x 108
pt= 峰值發(fā)射功率
dt= 物體(即)與雷達(dá)發(fā)射天線
之間的距離 dr= 雷達(dá)的物體和接收天線之間的距離。
Lt=發(fā)射機(jī)損耗
Lr=接收器損耗
Lm=中等損失
σB= (4*π*Ae2)/λ2
這里 Ae是對(duì)象投影區(qū)域。
多普勒雷達(dá)
多普勒雷達(dá)非常簡(jiǎn)單,利用連續(xù)波進(jìn)行傳輸。因此,多普勒雷達(dá)也被稱為CW雷達(dá)。該雷達(dá)基于以下原理。返回信號(hào)的頻率,即來(lái)自固定目標(biāo)的回波與發(fā)射波相同,而 來(lái)自運(yùn)動(dòng)目標(biāo)的返回信號(hào)的頻率將根據(jù)多普勒頻率進(jìn)行偏移。通過(guò)測(cè)量發(fā)射頻率和反射接收頻率之間的差異,雷達(dá)提取目標(biāo)的相對(duì)速度。
由于連續(xù)發(fā)射的形式,基本的多普勒雷達(dá)對(duì)距離測(cè)量沒有用。這個(gè)概念用于下面描述的警察雷達(dá),用于跟蹤快速移動(dòng)車輛的速度。它用于爬升率米,也用于測(cè)量飛機(jī)的速度。
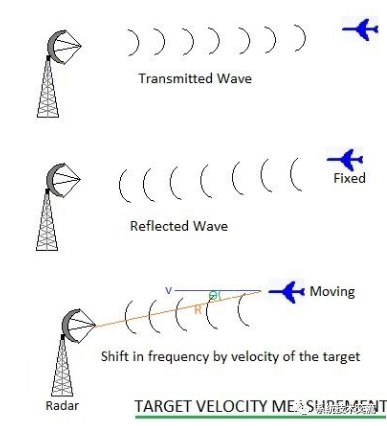
如圖所示,如果目標(biāo)是固定的,則發(fā)射波的數(shù)量與反射的接收波的數(shù)量相同。如果目標(biāo)正在移動(dòng),則反射波的數(shù)量會(huì)根據(jù)目標(biāo)向或遠(yuǎn)離的目標(biāo)移動(dòng)而減少或增加 雷達(dá)。
讓我們假設(shè)目標(biāo)正在向雷達(dá)移動(dòng)。在這種情況下,雷達(dá)和目標(biāo)之間的距離正在減少,這取決于 移動(dòng)目標(biāo)的速度大小。雷達(dá)經(jīng)歷返回的反射波頻率的明顯偏移,稱為多普勒頻移。當(dāng)發(fā)射波以GHz為單位時(shí),這種多普勒頻移大約約為1KHz量級(jí)。基于這種頻率速度的變化來(lái)確定目標(biāo),并且還可以找到其移動(dòng)方向。下面用多普勒雷達(dá)方程對(duì)此進(jìn)行了描述。
多普勒頻移,fd= 2* f0/c = dR/dt = 2*(dR/dt)/λ0= 2*V*余量θ/λ0
哪里 v 是目標(biāo)使角 θ 相對(duì)于位置矢量 (R) 的相對(duì)速度。
當(dāng)目標(biāo)沿雷達(dá)方向移動(dòng)時(shí),角度 θ 將在 0 到 90 度之間,信號(hào)頻率 f0將增加量 fd. 當(dāng)目標(biāo)遠(yuǎn)離雷達(dá)時(shí),θ 將在 90 到 180 度之間,f0將減少 fd. 當(dāng)速度垂直時(shí),f不會(huì)有變化0和 fd為零。
在多普勒雷達(dá)中,可以通過(guò)測(cè)量多普勒頻移和極性來(lái)確定距離速率。
基于多普勒的警用雷達(dá)
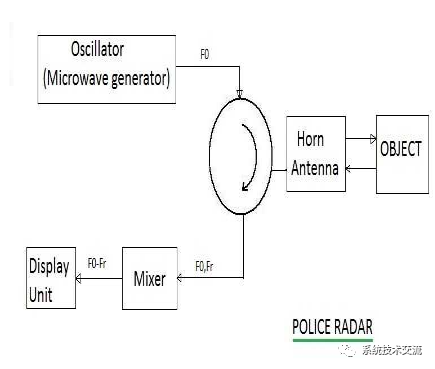
圖2描繪了警用雷達(dá)中使用的模塊。它用于檢測(cè)和測(cè)量移動(dòng)車輛的速度。如圖所示,微波信號(hào)發(fā)生器用作發(fā)射器。這里使用基于岡恩二極管的振蕩器來(lái)產(chǎn)生微波信號(hào)。微波信號(hào)通過(guò)射頻環(huán)行器通過(guò)喇叭天線傳輸。傳輸信號(hào)泄漏部分用于 與反射信號(hào)進(jìn)行比較。RF混頻器產(chǎn)生這兩個(gè)輸入信號(hào)頻率的和和差。總和分量被忽略,并使用差分量,這是由于多普勒頻移造成的。這種類型的雷達(dá)被稱為警用雷達(dá)。處理后的多普勒頻率被饋送到雷達(dá)示波器或顯示單元。該顯示單元提供移動(dòng)車輛的速度。
以下公式可用于警用雷達(dá)計(jì)算車輛的速度。
速度(以英里/小時(shí)為單位)= 0.26 *(多普勒頻移,單位為 Hz)/(微波頻率,單位為 GHz)
FMCW雷達(dá)系統(tǒng)
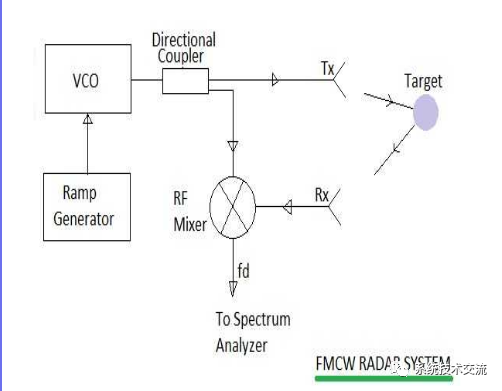
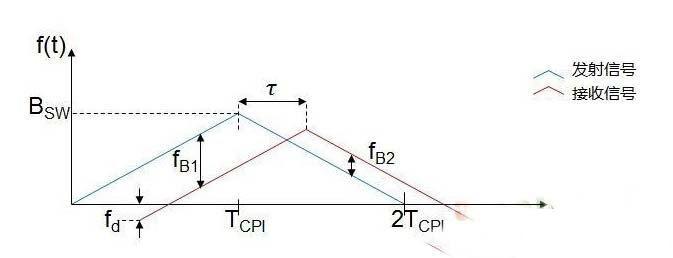
FMCW雷達(dá)基本上是一種調(diào)頻連續(xù)波雷達(dá)。這里載波信號(hào)頻率f0由頻率 f 調(diào)制m(t) 使得發(fā)射頻率f我可以如下所示。
f我= f0+ fm(t)。
多普勒雷達(dá)不用于距離或距離測(cè)量。這是由于多普勒雷達(dá)中缺乏標(biāo)記發(fā)射和接收時(shí)間戳。此時(shí)間戳差異用于確定范圍信息。為了克服這個(gè)問(wèn)題,利用頻率隨時(shí)間的變化來(lái)確定范圍。下面的FMCW雷達(dá)波形中也描述了相同的情況。
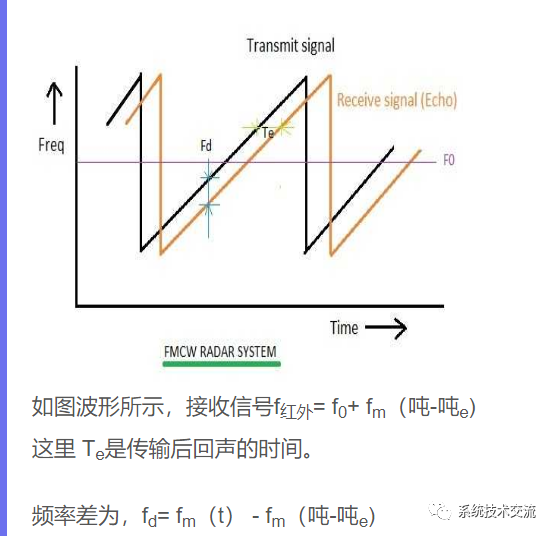
FMCW雷達(dá)系統(tǒng)的范圍可以通過(guò)以下公式給出:
范圍= c * fd/2*a;
其中 a= fd/Te
FMCW雷達(dá)的工作功率比脈沖雷達(dá)低。它用于非常短距離的目標(biāo)。
探地雷達(dá)系統(tǒng)
探地雷達(dá)稱為GPR是一種開發(fā)的雷達(dá) 分析地面的內(nèi)部結(jié)構(gòu)。它采用頻率范圍從1到約1000MHz的無(wú)線電波。它有助于繪制地面結(jié)構(gòu)和地面要素。
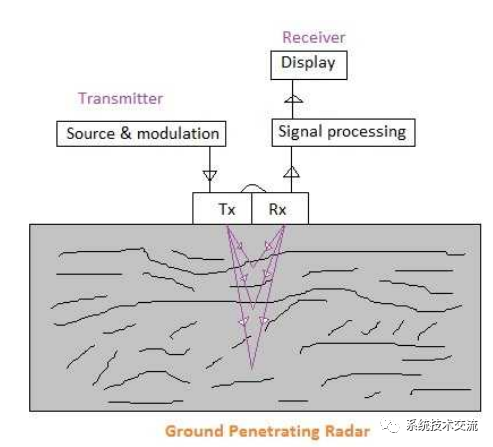
圖描述了探地雷達(dá)系統(tǒng)使用的典型部件。與其他無(wú)線系統(tǒng)類似,該雷達(dá)將由發(fā)射器和接收器部分組成。發(fā)射器部分包括源信號(hào)生成、調(diào)制和射頻上變頻,然后饋送 信號(hào)到天線以傳輸?shù)綀?jiān)實(shí)的地面。這與無(wú)線系統(tǒng)相反,在無(wú)線系統(tǒng)中,信號(hào)被傳輸?shù)娇諝庵小?/p>
接收部分由信號(hào)采樣、信號(hào)數(shù)字化、數(shù)據(jù)存儲(chǔ)、信號(hào)處理顯示和雷達(dá)示波器顯示組成 根據(jù)需要提供相關(guān)信息。
探地雷達(dá)系統(tǒng)的工作原理如下:
? 發(fā)射器將RF(射頻)信號(hào)發(fā)射到固體地面
? 檢測(cè)并記錄回波的不同時(shí)間實(shí)例并利用這些信息 以構(gòu)建圖像。
? 根據(jù)信號(hào)時(shí)間延遲提供示波器的圖像信息 和用戶的信號(hào)強(qiáng)度。
應(yīng)用
以下是該雷達(dá)的應(yīng)用:
? 測(cè)量北極地區(qū)和其他地方
的冰雪厚度 ? 定位埋在地下
的公用設(shè)施 ? 評(píng)估礦場(chǎng)
? 進(jìn)行法醫(yī)調(diào)查
? 挖掘考古遺址
? 搜索埋藏的地雷
? 預(yù)測(cè)雪崩
編輯:黃飛













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論