HSD驅動燈的診斷問題
?
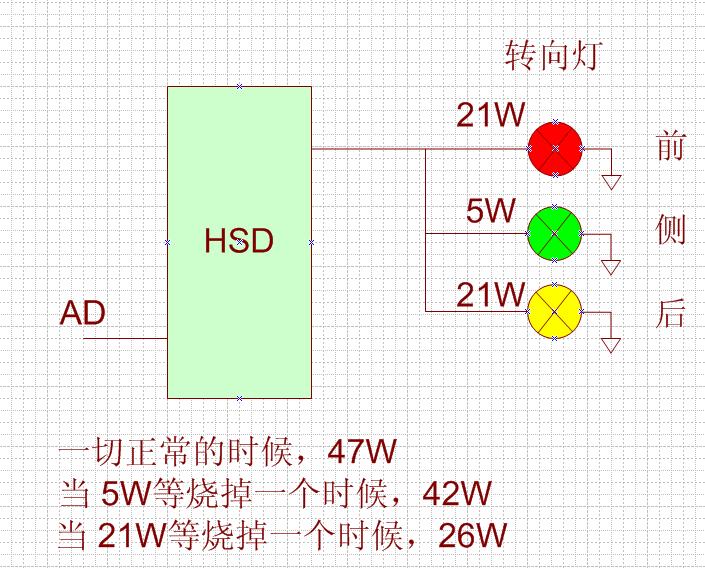
我們一般使用HSD驅動轉向燈,轉向燈有前后側三個,一般分別為21W,21W,5W。轉向燈非常重要,屬于安全系統一部分,設想一下沒有轉向燈轉彎是一件多么可怕的事情。因此我們需要認真對待轉向燈的診斷問題。
下面介紹一下K值的概念,以 ST公司的HSD為例,ST的東西相對來說非常便宜,不過用的時候得注意設計,一般設計的時候冗余度比較小。
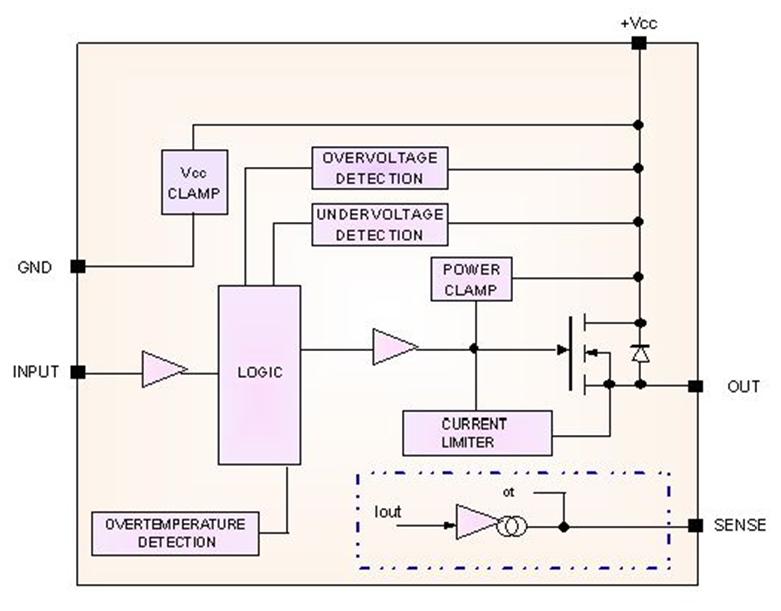
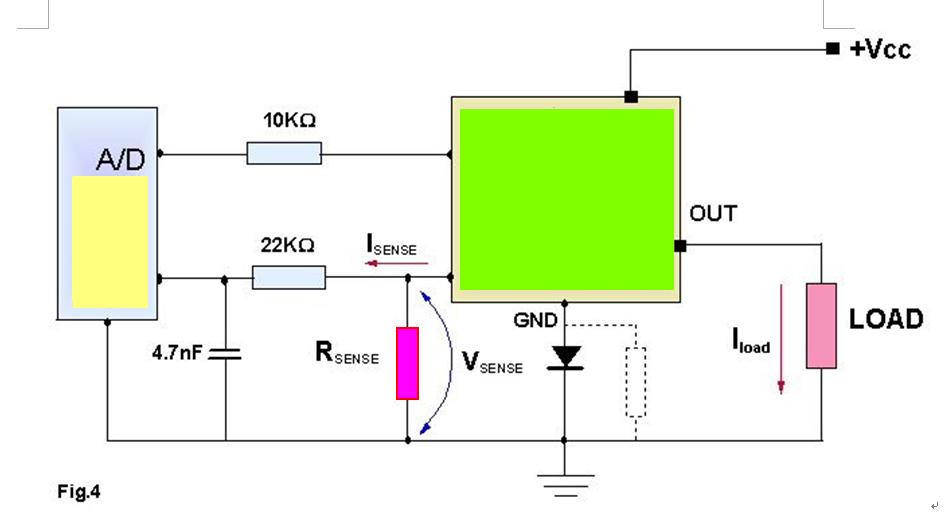
其內部電流鏡像電路大致如圖:
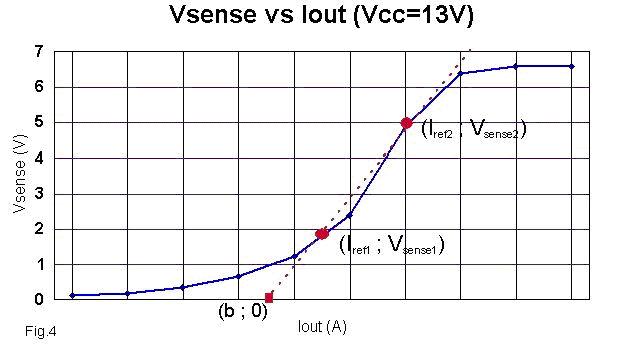
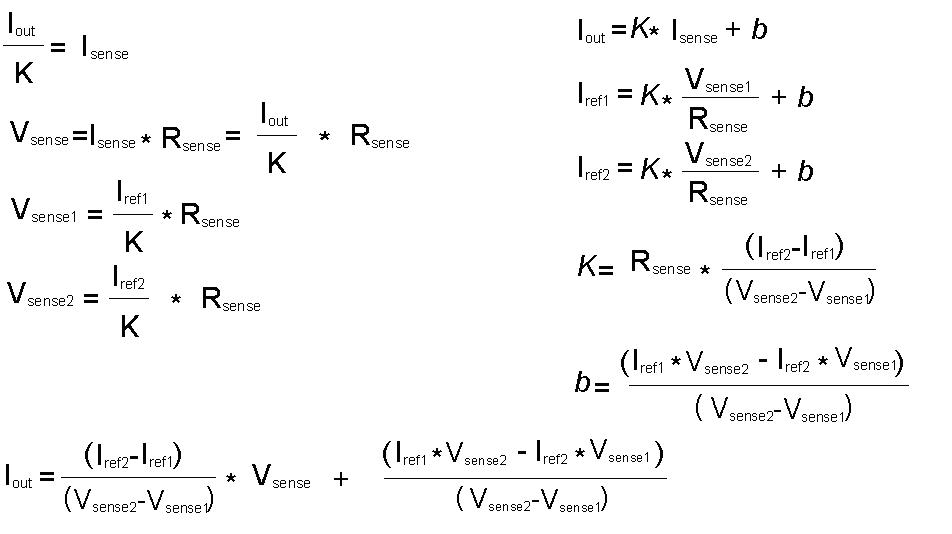
按照上面的接法,可以把K線性化,通過以下公式。
通過以下的一個流程圖可以把上面的過程清晰的表達出來:
以上提出了一個診斷的問題,大致描述了K是怎么定義的,HSD內部關于鏡像電流的結構和一些特性,以及HSD怎么樣去線性化的問題。大部分摘自ST的應用文檔。
這是第一部分的內容,第二部分將會主要介紹實際在燈診斷過程中如何計算的問題
下面介紹一下K值的概念,以 ST公司的HSD為例,ST的東西相對來說非常便宜,不過用的時候得注意設計,一般設計的時候冗余度比較小。
其內部電流鏡像電路大致如圖:
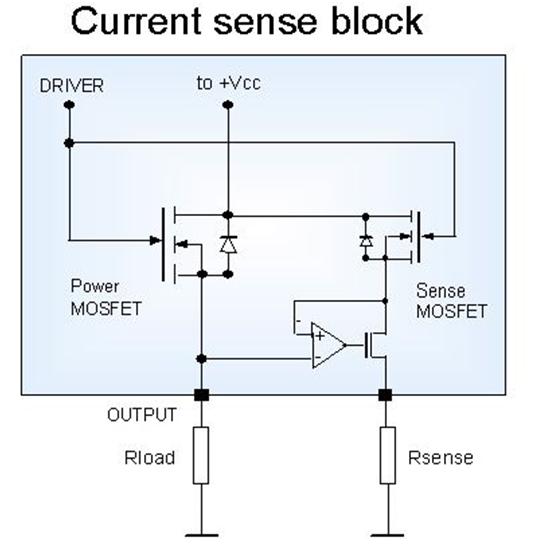
這里面有兩個通路,一是電流通過 N溝道 MOS管和采樣電阻 (Isense) ,另外一個是電流主通路由 N溝道 MOS和負載構成的。有以下的關系:Iload=K*Isense
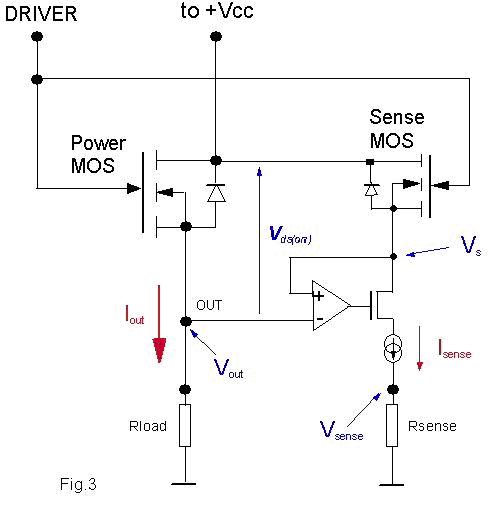
K定義為兩個溝道的電流比例。負載電流在輸出引腳上產生一個壓差Vds(on)
運算放大器比較Vds(on)和到內部參考電壓VS;
如果Vds(on) < Vs,對檢測電阻Vsense電壓約為零。因此采樣電流和與負載電流不成比例。
如果Vds(on) > Vs,電路控制采樣電流,Vsense=(K/Rsense)*Iload.
如果發生短路故障:Vds(on)>>Vs。在此情況下Vsense是拉調升為電壓VsenseH(典型值5.5伏)。
按照上面的接法,可以把K線性化,通過以下公式。
通過以下的一個流程圖可以把上面的過程清晰的表達出來:
以上提出了一個診斷的問題,大致描述了K是怎么定義的,HSD內部關于鏡像電流的結構和一些特性,以及HSD怎么樣去線性化的問題。大部分摘自ST的應用文檔。
這是第一部分的內容,第二部分將會主要介紹實際在燈診斷過程中如何計算的問題