 電子發燒友App
電子發燒友App


摘 要
基于UCD92xx 與UCD7xxx 的非隔離數字電源,其輸出電壓在軟啟動階段經常出現“臺階”現象,波形不平滑,尤其是輸出電壓設定為較低值時,如1.0V。這種“臺階”現象與UCD92xx 軟啟動的設計原理有關,但完全可以通過一定的措施來優化并最終解決。本文從UCD92xx 的環路和最小占空比寬度兩個方向進行優化與分析,最終取得了理想的效果。
1、軟啟動原理及待優化輸出電壓波形
數字電源UCD92xx 的軟啟動是通過對參考電壓以步進方式增加來實現的,整個過程是由芯片內部的軟件自動完成的。在一款基于UCD9224 和UCD74120 的單板上測試時發現,其輸出電壓波形在軟啟動階段有明顯的“臺階”現象,波形不平滑。
1.1 數字電源軟啟動原理介紹
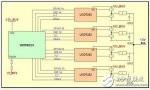
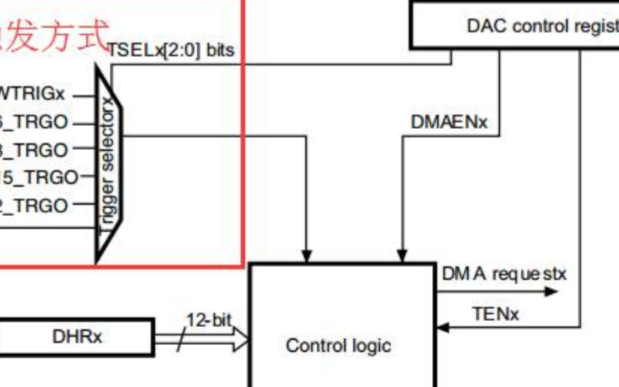
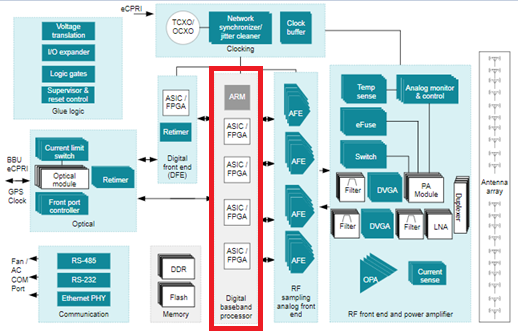
圖1 所示的是數字電源UCD92xx 的功率支路和控制支路。控制支路主要集成在UCD92xx 芯片內部,包含誤差生成及模數轉換,環路補償,PWM計算及產生等。其中,參考電壓(VREF)電壓的設置亦包含在控制支路。
依據軟件算法,在軟啟動階段,VREF 每100us 增加一次,直至軟啟動完成,即輸出電壓達到最終的設定值。例如,輸出電壓設定為1.0V,軟啟動的時間設置為4ms,則在軟啟動階段輸出電壓每一次增加25mv,直至達到1.0V。

圖 1:數字電源功率級和控制級框圖
1.2 待優化的輸出電壓波形
圖2 所示的是輸出電壓波形,可以觀察到在軟啟動階段輸出電壓的波形不夠平滑,有明顯的“臺階”現象。
該波形是在一款基于UCD9224 和UCD74120 的參考版上測得。主要測試條件為:測試環境常溫,輸入電壓為12V,輸出電壓為1.0V,輸出端帶載20A。另外,測試時,數字環路的詳細配置見下文2.4 節。
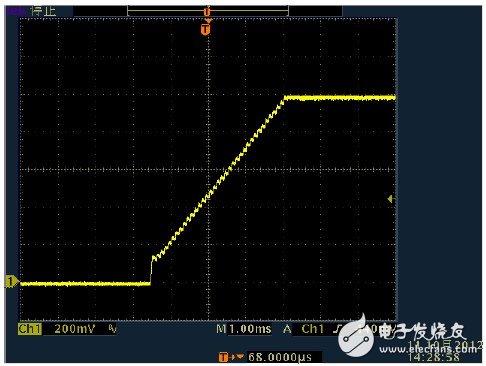
圖 2:輸出電壓波形
1.3 輸出電壓“臺階”現象的初步分析
圖3 所示的是時間軸展開后觀察到的輸出電壓波形。通過測量可知,每經過100us 輸出電壓增加一次,增加的幅度大約為23mV,與理論計算值25mV 基本一致。
同時也可以觀察到,輸出電壓的每一次增加都是很快的完成,而不是緩慢增加。從功率級支路上分析,這是由于占空比快速增加造成。從控制級支路分析,則原因可以初步歸結為環路過快造成的。
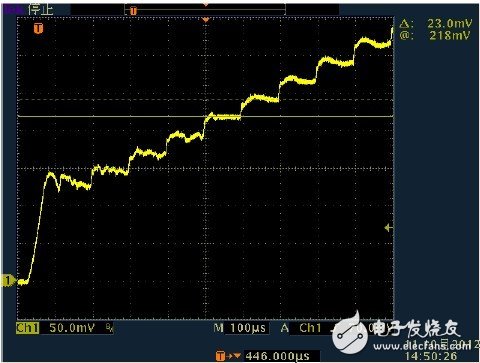
圖 3:輸出電壓的步進幅度
2 數字電源模擬前端及環路
數字電源控制環路包含了模擬前端,數字環路補償等模塊,在配置環路時需要綜合考慮。其中,數字環路還包含非線性增益模塊,使能后可以有效提升整個電源的動態響應性能。
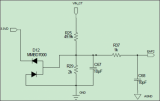
2.1 數字電源模擬前端(AFE)
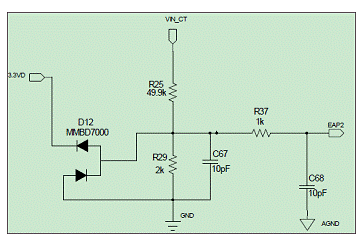
圖4 紅色框內電路為數字電源模擬前端(Analog-Front End,AFE)的一部分,其增益可以設置為1,2,4,8 等四個不同的值。設置不同的增益,則ADC 的輸出精度也隨之不同,比如設置增益為4,則輸出精度為2mV;設置增益為1,則輸出精度為8mV。
在相同輸入誤差(VEAP-VEAN)的情況下,不同的AFE 增益值將直接影響環路指標。其影響趨勢為,增益越大,環路帶寬越寬。

圖 4:數字電源的模擬前端
2.2 數字電源環路


圖 5:數字電源環路框圖
2.3 非線性增益

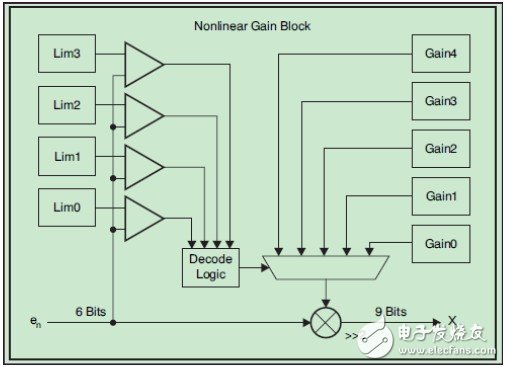
圖 6:非線性增益模塊
2.4 數字電源環路配置
圖6 和圖7 是使用數字電源開發工具Fusion Digital Power Designer 來配置環路的軟件截圖。該工具可以模擬整個環路并給出配置之后的閉環環路指標,包括截止頻率,相位余度和增益余度,極大的方便了環路的調試和優化。
圖6 所示的是軟啟動時的環路配置。零極點的信息在“Linear Compensation”方框中,其中AFE 的Gain 設置為4×;該配置中使能了非線性增益,其Limit 值和Gain 值是允許用戶修改的。最終,整個環路的指標為23.87KHz(截止頻率),49.33°(相位余度),11.77dB(增益余度)。
圖7 所示的是正常運行時的環路配置。零極點的信息在“Linear Compensation”方框中,其中AFE 的Gain 為4×;該配置中使能了非線性增益,其Limit 值和Gain 值是允許用戶修改的。最終,整個環路的指標為33. 7KHz(截止頻率),50.57°(相位余度),8.77dB(增益余度)。
正是采樣上述配置,輸出電壓在軟啟動階段其波形有明顯的“臺階狀”。下面將嘗試放慢環路后,驗證是否可以優化軟啟動階段的波形。
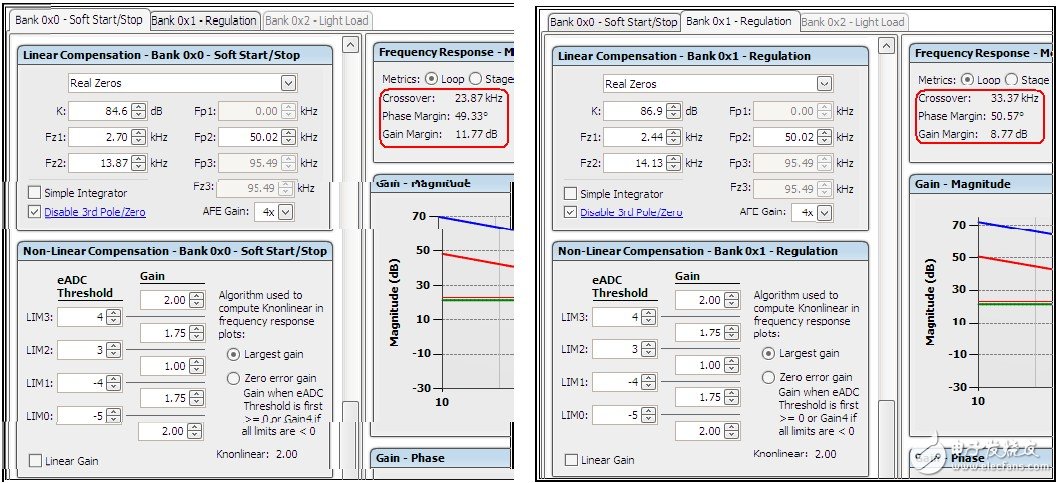
圖 7:軟啟動環路配置 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 圖 8:正常運行時的環路配置
2.5 優化環路配置
圖9 是軟啟動環路優化后的軟件截圖。
環路的優化包括:1)不再使能非線性增益,同時將Gain0 由1 修改為0.5;這可以降低環路的低頻增益,最終降低環路帶寬;2)將AFE 的Gain 由4 修改為1,同樣可以降低環路帶寬。1 倍的Gain 將使AFE 的輸出的精度變差,并最終影響到輸出電壓,但考慮到軟啟動階段對輸出電壓的精度要求略低,因此可以上述修改可以接受。
需要說明的是,為保證正常運行時輸出電壓的性能(精度,動態性能等),正常運行時對應的環路參數將保持不變。

圖 9:優化軟啟動環路參數
圖10 所示的是優化環路后的輸出電壓波形,可以觀察到在軟啟動階段的“臺階”現象消失,波形平滑。
圖11 是將時間軸展開后的輸出電壓波形,可以觀察到其步進的時間依然是100us,步進的幅度為24mV(與理論值25mV 基本一致),但每一次的步進不再是突然增加,而是緩慢增加。因此,輸出電壓波形變得較為平滑。

圖 10:優化后的軟啟動波形 圖 11:展開時間抽觀察輸出電壓波形
但是,在圖10 所示的波形中可以觀察到,輸出電壓在啟動時刻有一個正向過沖并很快回落。嚴格意義上,該過沖會影響輸出電壓波形的單調性,在一些應用場景中是不運行的。下文將針對該過沖進行優化。
3 調整最小驅動時間進一步優化輸出波形
優化環路后輸出電壓在軟啟動階段變得較為平滑,但會存在一個明顯的過沖,需要進行優化。下文通過調整最小占空比寬度來消除該過沖。
3.1 數字電源軟啟動的kick-start
圖12 中所示的是數字電源的輸出電壓軟啟動示意圖。在開始時刻,輸出電壓有一個快速的上升,稱之為“Kick-start”。 Kick-start 的幅度是根據下面公式計算出的:
Vstart =Vin×DRIVER_MIN_PULSE × Fsw
其中,DRIVER_MIN_PULSE 是指UCD92xx 發出的最小占空比的寬度,允許用戶自行設定。
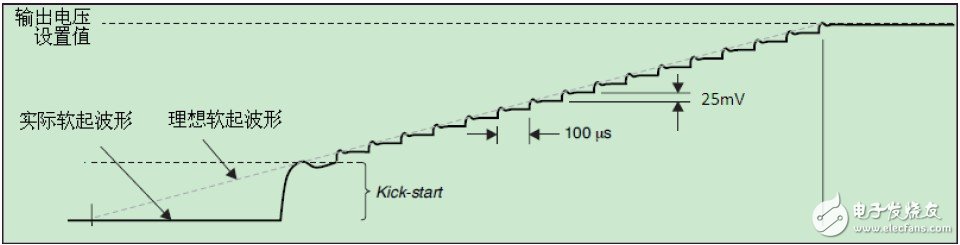
圖 12:輸出電壓軟啟動
以圖10 為例,輸出電壓Kick-start 的幅度約為185mV。其DRIVER_MIN_PULSE 設置為50ns,理論計算Kickstart的幅度為:12V×50ns×300KHz=180mV。實際值與理論值基本一致。
3.2 調整最小占空比寬度
將DRIVER_MIN_PULSE 由目前的50ns 修改為5ns,以驗證其對輸出電壓的過沖有無改善。圖13 即為輸出電壓波形,可以觀察到過沖已經消失,但在起始時刻,輸出電壓不再平滑。
分析原因可知,當DRIVER_MIN_PULSE 設置為5ns 后,雖然UCD9224 可以發出寬度為5ns 的驅動脈沖,但UCD74120 對最小占空比的寬度有要求,5ns 的寬度不足以使集成在UCD74120 內部的buck 上管導通,從而造成了輸出電壓上升的不平滑。

圖 13:最小占空比寬度修改為5ns 后的輸出電壓波形
過小的DRIVER_MIN_PULSE 值會使輸出電壓在起始時刻變得不再平滑;過大的DRIVER_MIN_PULSE 的值則會帶來正向過沖。因此,需要找到一個平衡點。
逐步增大DRIVER_MIN_PULSE 的值,當設置為43ns 時,達到了較為理想的平衡點,輸出電壓的波形如圖14所示,輸出不再有正向過程,而且在整個軟啟動階段輸出電壓波形都比較平滑。
此時,輸出電壓Kick-start 的幅度約為160mV。其DRIVER_MIN_PULSE 為43ns,理論計算Kick-start 的幅度為:12V×43ns×300KHz=154.8mV。實際值與理論值基本一致。

圖 14:最終優化的輸出電壓波形
4 結論
通過修改AFE 的增益值和禁止非線性增益等措施優化軟啟動對應的環路參數后,可以消除輸出電壓的“臺階”現象,使波形單調平滑上升。正常運行的環路參數無需改動,保證了其較高的帶寬,從而使輸出電壓的精度和動態響應等指標保持不變。
通過優化最小占空比的寬度,可以消除在kick-start 之后的正向過程,使輸出電壓波形單調平滑。
綜上兩類優化措施,最終可以使輸出電壓波形在整個軟啟動階段單調平滑。
5 參考文獻
1. UCD92xx-Design-Guide, Texas Instruments Inc., 2011
2. UCD9224 datasheet, Texas Instruments Inc., 2010
3. UCD74120 datasheet, Texas Instruments Inc., 2012















 工商網監
工商網監
評論