 電子發燒友App
電子發燒友App


最近在搞stm32實驗板的can現場總線實驗,之前只是搞過STC51的串口通信,相比之下,發覺can總線都挺復雜的。開始時,知道自己是新手,只知道can總線跟串行通信,485通信,I2C通信一樣都是用來傳輸數據通信的,對其工作原理一竅不通,還是從基礎開始看書看資料,先了解它的基本原理吧。
原來can總線有以下特點:
主要特點
支持CAN協議2.0A和2.0B主動模式
波特率最高可達1兆位/秒
支持時間觸發通信功能
?
發送
3個發送郵箱
發送報文的優先級特性可軟件配置
記錄發送SOF時刻的時間戳
?
接收
3級深度的2個接收FIFO
14個位寬可變的過濾器組-由整個CAN共享
標識符列表
FIFO溢出處理方式可配置
記錄接收SOF時刻的時間戳
?
可支持時間觸發通信模式
禁止自動重傳模式
16位自由運行定時器
定時器分辨率可配置
可在最后2個數據字節發送時間戳
?
管理
中斷可屏蔽
郵箱占用單獨1塊地址空間,便于提高軟件效率
?
看完這些特點后,疑問一個一個地出現,
1. 什么是時間觸發功能?
2. 發送郵箱是什么來的?
3. 報文是什么來的?
4. 什么叫時間戳?
5. 什么叫接收FIFO?
6. 什么叫過濾器?
?
好了,帶著疑問往下看,看完一遍后,
?
報文:
報文包含了將要發送的完整的數據信息
?
發送郵箱:
共有3個發送郵箱供軟件來發送報文。發送調度器根據優先級決定哪個郵箱的報文先被發送。
?
接收過濾器:
共有14個位寬可變/可配置的標識符過濾器組,軟件通過對它們編程,從而在引腳收到的報文中選擇它需要的報文,而把其它報文丟棄掉。
?
接收FIFO
共有2個接收FIFO,每個FIFO都可以存放3個完整的報文。它們完全由硬件來管理
?
工作模式
bxCAN有3個主要的工作模式:初始化、正常和睡眠模式。
?
初始化模式
*軟件通過對CAN_MCR寄存器的INRQ位置1,來請求bxCAN進入初始化模式,然后等待硬件對CAN_MSR寄存器的INAK位置1來進行確認
*軟件通過對CAN_MCR寄存器的INRQ位清0,來請求bxCAN退出初始化模式,當硬件對CAN_MSR寄存器的INAK位清0就確認了初始化模式的退出。
*當bxCAN處于初始化模式時,報文的接收和發送都被禁止,并且CANTX引腳輸出隱性位(高電平)
?
正常模式
在初始化完成后,軟件應該讓硬件進入正常模式,以便正常接收和發送報文。軟件可以通過對CAN_MCR寄存器的INRQ位清0,來請求從初始化模式進入正常模式,然后要等待硬件對CAN_MSR寄存器的INAK位置1的確認。在跟CAN總線取得同步,即在CANRX引腳上監測到11個連續的隱性位(等效于總線空閑)后,bxCAN才能正常接收和發送報文。
?
過濾器初值的設置不需要在初始化模式下進行,但必須在它處在非激活狀態下完成(相應的FACT位為0)。而過濾器的位寬和模式的設置,則必須在初始化模式下,進入正常模式前完成。
?
睡眠模式(低功耗)
*軟件通過對CAN_MCR寄存器的SLEEP位置1,來請求進入這一模式。在該模式下,bxCAN的時鐘停止了,但軟件仍然可以訪問郵箱寄存器。
*當bxCAN處于睡眠模式,軟件想通過對CAN_MCR寄存器的INRQ位置1,來進入初始化式,那么軟件必須同時對SLEEP位清0才行
*有2種方式可以喚醒(退出睡眠模式)bxCAN:通過軟件對SLEEP位清0,或硬件檢測CAN總線的活動。
?
工作流程
那么究竟can是怎樣發送報文的呢?
發送報文的流程為:
應用程序選擇1個空發送郵箱;設置標識符,數據長度和待發送數據;然后對CAN_TIxR寄存器的TXRQ位置1,來請求發送。TXRQ位置1后,郵箱就不再是空郵箱;而一旦郵箱不再為空,軟件對郵箱寄存器就不再有寫的權限。TXRQ位置1后,郵箱馬上進入掛號狀態,并等待成為最高優先級的郵箱,參見發送優先級。一旦郵箱成為最高優先級的郵箱,其狀態就變為預定發送狀態。一旦CAN總線進入空閑狀態,預定發送郵箱中的報文就馬上被發送(進入發送狀態)。一旦郵箱中的報文被成功發送后,它馬上變為空郵箱;硬件相應地對CAN_TSR寄存器的RQCP和TXOK位置1,來表明一次成功發送。
?
如果發送失敗,由于仲裁引起的就對CAN_TSR寄存器的ALST位置1,由于發送錯誤引起的就對TERR位置1。
?
原來發送的優先級可以由標識符和發送請求次序決定:
由標識符決定
當有超過1個發送郵箱在掛號時,發送順序由郵箱中報文的標識符決定。根據CAN協議,標識符數值最低的報文具有最高的優先級。如果標識符的值相等,那么郵箱號小的報文先被發送。
由發送請求次序決定
通過對CAN_MCR寄存器的TXFP位置1,可以把發送郵箱配置為發送FIFO。在該模式下,發送的優先級由發送請求次序決定。該模式對分段發送很有用。
?
時間觸發通信模式
在該模式下,CAN硬件的內部定時器被激活,并且被用于產生時間戳,分別存儲在CAN_RDTxR/CAN_TDTxR寄存器中。內部定時器在接收和發送的幀起始位的采樣點位置被采樣,并生成時間戳(標有時間的數據)。
?
接著又是怎樣接收報文的呢?
接收管理
接收到的報文,被存儲在3級郵箱深度的FIFO中。FIFO完全由硬件來管理,從而節省了CPU的處理負荷,簡化了軟件并保證了數據的一致性。應用程序只能通過讀取FIFO輸出郵箱,來讀取FIFO中最先收到的報文。
?
有效報文
根據CAN協議,當報文被正確接收(直到EOF域的最后1位都沒有錯誤),且通過了標識符過濾,那么該報文被認為是有效報文。
?
接收相關的中斷條件
* 一旦往FIFO存入1個報文,硬件就會更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位為1,那么就會產生一個中斷請求。
* 當FIFO變滿時(即第3個報文被存入),CAN_RFxR寄存器的FULL位就被置1,并且如果CAN_IER寄存器的FFIE位為1,那么就會產生一個滿中斷請求。
* 在溢出的情況下,FOVR位被置1,并且如果CAN_IER寄存器的FOVIE位為1,那么就會產生一個溢出中斷請求
?
標識符過濾
在CAN協議里,報文的標識符不代表節點的地址,而是跟報文的內容相關的。因此,發送者以廣播的形式把報文發送給所有的接收者。(注:不是一對一通信,而是多機通信)節點在接收報文時-根據標識符的值-決定軟件是否需要該報文;如果需要,就拷貝到SRAM里;如果不需要,報文就被丟棄且無需軟件的干預。為滿足這一需求,bxCAN為應用程序提供了14個位寬可變的、可配置的過濾器組(13~0),以便只接收那些軟件需要的報文。硬件過濾的做法節省了CPU開銷,否則就必須由軟件過濾從而占用一定的CPU開銷。每個過濾器組x由2個32位寄存器,CAN_FxR0和CAN_FxR1組成。
?
過濾器的模式的設置
通過設置CAN_FM0R的FBMx位,可以配置過濾器組為標識符列表模式或屏蔽位模式。
為了過濾出一組標識符,應該設置過濾器組工作在屏蔽位模式。
為了過濾出一個標識符,應該設置過濾器組工作在標識符列表模式。
應用程序不用的過濾器組,應該保持在禁用狀態。
?
過濾器優先級規則
位寬為32位的過濾器,優先級高于位寬為16位的過濾器
對于位寬相同的過濾器,標識符列表模式的優先級高于屏蔽位模式
位寬和模式都相同的過濾器,優先級由過濾器號決定,過濾器號小的優先級高
?
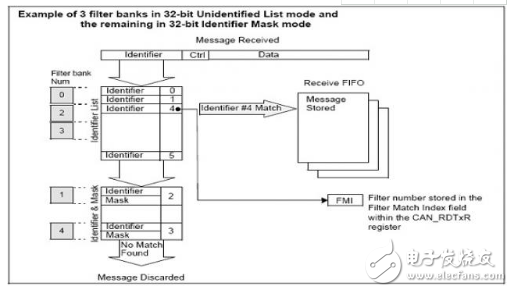
上面的例子說明了bxCAN的過濾器規則:在接收一個報文時,其標識符首先與配置在標識符列表模式下的過濾器相比較;如果匹配上,報文就被存放到相關聯的FIFO中,并且所匹配的過濾器的序號被存入過濾器匹配序號中。如同例子中所顯示,報文標識符跟#4標識符匹配,因此報文內容和FMI4被存入FIFO。
如果沒有匹配,報文標識符接著與配置在屏蔽位模式下的過濾器進行比較。
如果報文標識符沒有跟過濾器中的任何標識符相匹配,那么硬件就丟棄該報文,且不會對軟件有任何打擾。
?
接收郵箱(FIFO)
在接收到一個報文后,軟件就可以訪問接收FIFO的輸出郵箱來讀取它。一旦軟件處理了報文(如把它讀出來),軟件就應該對CAN_RFxR寄存器的RFOM位進行置1,來釋放該報文,以便為后面收到的報文留出存儲空間。
?
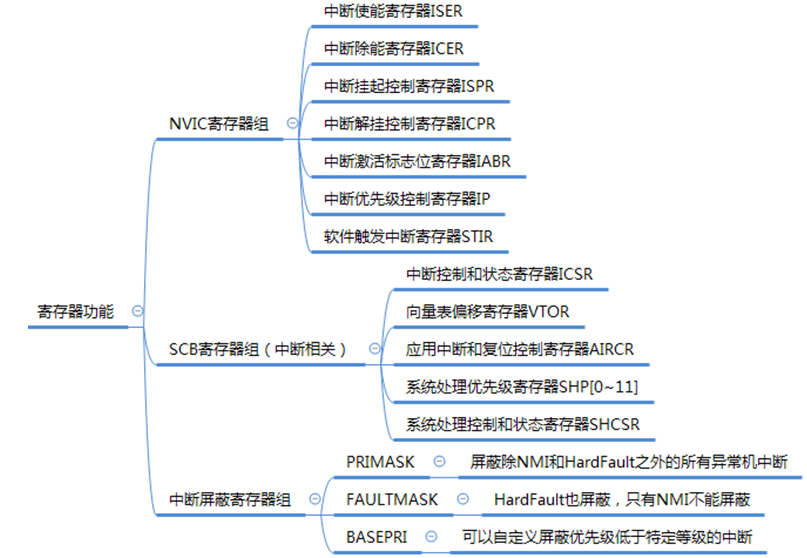
中斷
bxCAN占用4個專用的中斷向量。通過設置CAN中斷允許寄存器(CAN_IER),每個中斷源都可以單獨允許和禁用。
?
發送中斷可由下列事件產生:
─ 發送郵箱0變為空,CAN_TSR寄存器的RQCP0位被置1。
─ 發送郵箱1變為空,CAN_TSR寄存器的RQCP1位被置1。
─ 發送郵箱2變為空,CAN_TSR寄存器的RQCP2位被置1。
FIFO0中斷可由下列事件產生:
─ FIFO0接收到一個新報文,CAN_RF0R寄存器的FMP0位不再是‘00’。
─ FIFO0變為滿的情況,CAN_RF0R寄存器的FULL0位被置1。
─ FIFO0發生溢出的情況,CAN_RF0R寄存器的FOVR0位被置1。
FIFO1中斷可由下列事件產生:
─ FIFO1接收到一個新報文,CAN_RF1R寄存器的FMP1位不再是‘00’。
─ FIFO1變為滿的情況,CAN_RF1R寄存器的FULL1位被置1。
─ FIFO1發生溢出的情況,CAN_RF1R寄存器的FOVR1位被置1。
錯誤和狀態變化中斷可由下列事件產生:
─ 出錯情況,關于出錯情況的詳細信息請參考CAN錯誤狀態寄存器(CAN_ESR)。
─ 喚醒情況,在CAN接收引腳上監視到幀起始位(SOF)。
─ CAN進入睡眠模式。
?
工作流程大概就是這個樣子,接著就是一大堆煩人的can寄存器,看了一遍總算有了大概的了解,況且這么多的寄存器要一下子把他們都記住是不可能的。根據以往的經驗,只要用多幾次,對寄存器的功能就能記住。
好了,到讀具體實驗程序的時候了,這時候就要打開“STM32庫函數”的資料。因為它里面有STM32打包好的庫函數的解釋,對讀程序很有幫助。
下面是主程序:
int main(void)
{
// ?int press_count = 0;
char data = '0';
int sent = FALSE;
?
#ifdef DEBUG
debug();
#endif
?
/* System Clocks Configuration */
RCC_Configuration();
?
/* NVIC Configuration */
NVIC_Configuration();
?
/* GPIO ports pins Configuration */
GPIO_Configuration();
?
USART_Configuration();
?
CAN_Configuration();
?
Serial_PutString("\r\n偉研科技 \r\n");
Serial_PutString("CAN test\r\n");
?
while(1){
if(GPIO_Keypress(GPIO_KEY, BUT_RIGHT)){
GPIO_SetBits(GPIO_LED, GPIO_LD1);//檢測到按鍵按下
?
if(sent == TRUE)
continue;
sent = TRUE;
data++;
if(data > 'z')
data = '0';
CAN_TxData(data);
}
else{//按鍵放開
GPIO_ResetBits(GPIO_LED, GPIO_LD1); ?
sent = FALSE;
}
}
}
?
前面的RCC、NVIC、GPIO、USART配置和之前的實驗大同小異,關鍵是分析CAN_Configuration()函數如下:
void CAN_Configuration(void)//CAN配置函數
{
CAN_InitTypeDef ? ? ? ?CAN_InitStructure;
CAN_FilterInitTypeDef ?CAN_FilterInitStructure;
?
/* CAN register init */
CAN_DeInit();
// ?CAN_StructInit(&CAN_InitStructure);
?
/* CAN cell init */
CAN_InitStructure.CAN_TTCM=DISABLE;//禁止時間觸發通信模式
CAN_InitStructure.CAN_ABOM=DISABLE;//,軟件對CAN_MCR寄存器的INRQ位進行置1隨后清0后,一旦硬件檢測
//到128次11位連續的隱性位,就退出離線狀態。
?
CAN_InitStructure.CAN_AWUM=DISABLE;//睡眠模式通過清除CAN_MCR寄存器的SLEEP位,由軟件喚醒
?
CAN_InitStructure.CAN_NART=ENABLE;//DISABLE;CAN報文只被發送1次,不管發送的結果如何(成功、出錯或仲裁丟失)
?
CAN_InitStructure.CAN_RFLM=DISABLE;//在接收溢出時FIFO未被鎖定,當接收FIFO的報文未被讀出,下一個收到的報文會覆蓋原有
//的報文
?
CAN_InitStructure.CAN_TXFP=DISABLE;//發送FIFO優先級由報文的標識符來決定
// ?CAN_InitStructure.CAN_Mode=CAN_Mode_LoopBack;
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal; //CAN硬件工作在正常模式
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq;//重新同步跳躍寬度1個時間單位
CAN_InitStructure.CAN_BS1=CAN_BS1_8tq;//時間段1為8個時間單位
CAN_InitStructure.CAN_BS2=CAN_BS2_7tq;//時間段2為7個時間單位
CAN_InitStructure.CAN_Prescaler = 9; //(pclk1/((1+8+7)*9)) = 36Mhz/16/9 = 250Kbits設定了一個時間單位的長度9
CAN_Init(&CAN_InitStructure);
?
/* CAN filter init 過濾器初始化*/
CAN_FilterInitStructure.CAN_FilterNumber=0;//指定了待初始化的過濾器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//指定了過濾器將被初始化到的模式為標識符屏蔽位模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//給出了過濾器位寬1個32位過濾器
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;//用來設定過濾器標識符(32位位寬時為其高段位,16位位寬時為第一個)
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;//用來設定過濾器標識符(32位位寬時為其低段位,16位位寬時為第二個
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//用來設定過濾器屏蔽標識符或者過濾器標識符(32位位寬時為其高段位,16位位寬時為第一個
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;//用來設定過濾器屏蔽標識符或者過濾器標識符(32位位寬時為其低段位,16位位寬時為第二個
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;//設定了指向過濾器的FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;//使能過濾器
CAN_FilterInit(&CAN_FilterInitStructure);
/* CAN FIFO0 message pending interrupt enable */
CAN_ITConfig(CAN_IT_FMP0, ENABLE);//使能指定的CAN中斷
}
?
再看看發送程序:
TestStatus CAN_TxData(char data)
{
CanTxMsg TxMessage;
?
u32 i = 0;
u8 TransmitMailbox = 0;
/*
u32 dataLen;
dataLen = strlen(data);
if(dataLen > 8)
dataLen = 8;
*/
/* transmit 1 message生成一個信息 */
TxMessage.StdId=0x00;// 設定標準標識符
TxMessage.ExtId=0x1234;// 設定擴展標識符
TxMessage.IDE=CAN_ID_EXT;// 設定消息標識符的類型
TxMessage.RTR=CAN_RTR_DATA;// 設定待傳輸消息的幀類型
/* ?TxMessage.DLC= dataLen;
for(i=0;i
TxMessage.Data = data;
*/
TxMessage.DLC= 1; //設定待傳輸消息的幀長度
TxMessage.Data[0] = data;// 包含了待傳輸數據
TransmitMailbox = CAN_Transmit(&TxMessage);//開始一個消息的傳輸
i = 0;
while((CAN_TransmitStatus(TransmitMailbox) != CANTXOK) && (i != 0xFF))//通過檢查CANTXOK位來確認發送是否成功
{
i++;
}
return (TestStatus)ret;
}
?
CAN_Transmit()函數的操作包括:
1. [選擇一個空的發送郵箱]
2. [設置Id]*
3. [設置DLC待傳輸消息的幀長度]
4. [請求發送]
請求發送語句:
CAN->sTxMailBox[TransmitMailbox].TIR |= TMIDxR_TXRQ;//對CAN_TIxR寄存器的TXRQ位置1,來請求發送
?
發送方面搞定了,但接收方面呢?好像在主程序里看不到有接收的語句。立刻向師兄求救。
原來是用來中斷方式來接收數據,原來它和串口一樣可以有兩種方式接收數據,一種是中斷方式一種是輪詢方式,若采用輪詢方式則要調用主函數的CAN_Polling(void)函數。
?
接著又遇到一個問題,為什么中斷函數CAN_Interrupt(void)的最后要關中斷呢?
因為一旦往FIFO存入1個報文,硬件就會更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位為1,那么就會產生一個中斷請求。所以中斷函數執行完后就要清除FMPIE標志位。這時我才回想起來,原來我對CAN的理解還不夠,對程序設計的初衷不夠明確,于是我重新看了一遍CAN的工作原理,這時后我發現比以前容易理解了,可能是因為看了程序以后知道了大概的流程,然后看資料就有了針對性。
發送者以廣播的形式把報文發送給所有的接收者(注:不是一對一通信,而是多機通信)節點在接收報文時-根據標識符的值-決定軟件是否需要該報文;如果需要,就拷貝到SRAM里;如果不需要,報文就被丟棄且無需軟件的干預。一旦往FIFO存入1個報文,硬件就會更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位為1,那么就會產生一個中斷請求。所以中斷函數執行完后就要清除FMPIE標志位。










 工商網監
工商網監
評論