完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫(kù)為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
使用四臺(tái)施耐德電氣高性能的 ATV71 變頻器分別控制分切機(jī)的放卷輥、驅(qū)動(dòng)輥和上下收卷輥。Control inside 卡安裝在驅(qū)動(dòng)輥?zhàn)冾l器上作為主控制器,通過(guò) CANopen 總線控制收放輥?zhàn)冾l器,實(shí)現(xiàn)收放卷的恒張力調(diào)節(jié)。...

單臺(tái)設(shè)備必須有軟手操/自動(dòng)切換以及軟手操時(shí)可以啟/停功能,由自動(dòng)切換到軟手操時(shí),設(shè)備不能停機(jī);由軟手操切換到自動(dòng)時(shí),設(shè)備啟/停取決于自動(dòng)程序。...
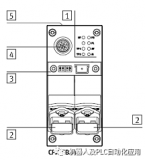
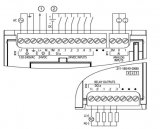
數(shù)字量輸入模板接線圖:數(shù)字輸入模塊SM 321 ;DI 32x 24 VDC;數(shù)字輸入模塊SM 321 ;D132 X 20VAC;...

程序有模擬量控制時(shí),如果讀取的模擬量基本上沒(méi)誤差,可以采取時(shí)間濾波的方式,延時(shí)一段時(shí)間。如果讀取的數(shù)據(jù)誤差很大,就需要采取其它的濾波方式,如算平均值等。...
網(wǎng)絡(luò)地址轉(zhuǎn)換(NAT:Network Address Translation)屬接入廣域網(wǎng)(WAN)技術(shù),是一種將私有(保留)地址轉(zhuǎn)化為合法IP地址的轉(zhuǎn)換技術(shù),它被廣泛應(yīng)用于各種類(lèi)型Internet接入方式和各種類(lèi)型的網(wǎng)絡(luò)中。...

此前介紹的系統(tǒng)診斷可與程序執(zhí)行異步執(zhí)行。為了在發(fā)生故障時(shí)正確地處理輸入和輸出數(shù)據(jù),某些模塊使用值狀態(tài) (QI = Quality Information) 進(jìn)行評(píng)估。...

機(jī)器視覺(jué)系統(tǒng)主要由三部分組成:圖像的獲取、圖像的處理和分析、輸出或顯示。而圖像的獲取是機(jī)器視覺(jué)的核心,圖像的獲取系統(tǒng)則是由光源、鏡頭、相機(jī)三部分組成。...

齒輪傳動(dòng)安裝時(shí),輪與電動(dòng)機(jī)要配套,轉(zhuǎn)軸的縱橫尺寸要與齒輪的尺寸配合;所裝齒輪的模數(shù)、直徑和齒形等應(yīng)與被動(dòng)輪配套;齒輪裝好后,要檢查合情況,不得過(guò)松或過(guò)緊,中心不應(yīng)偏移。...
區(qū)域和輪廓只包含對(duì)分割結(jié)果的原始描述,在實(shí)際應(yīng)用中我們還需要從區(qū)域或輪廓中確定一個(gè)或多個(gè)特征量。這些確定的特征量被稱為特征。...
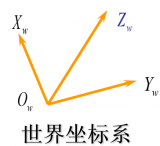
空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機(jī)參數(shù),為了得到這些參數(shù)而進(jìn)行的實(shí)驗(yàn)與計(jì)算的過(guò)程稱為攝像機(jī)標(biāo)定。...
三位來(lái)自通信協(xié)議組織的專家:PI用戶組織北美執(zhí)行董事 Michael Bowne、EtherCAT技術(shù)集團(tuán)北美代表 Bob Trask 和 ODVA組織分布式運(yùn)動(dòng)和時(shí)間同步 SIG成員Paul Brooks,向我們介紹了工程師如何優(yōu)化電機(jī)驅(qū)動(dòng)系統(tǒng)、改善工業(yè)電機(jī)通信、操作和安全。...
通過(guò)現(xiàn)場(chǎng)總線實(shí)現(xiàn)非環(huán)參數(shù)訪問(wèn),通過(guò)以太網(wǎng)實(shí)現(xiàn)非環(huán)數(shù)據(jù)訪問(wèn),快速啟動(dòng) (FSU),通過(guò)現(xiàn)場(chǎng)總線實(shí)現(xiàn)通道級(jí)診斷,純文本啟動(dòng)參數(shù)設(shè)置,通過(guò)現(xiàn)場(chǎng)總線,用過(guò)程參數(shù)可顯示系統(tǒng)狀態(tài),附加診斷接口,用于人機(jī)界面....
為什么用步進(jìn)電機(jī)來(lái)畫(huà)畫(huà)呢? 因?yàn)椴竭M(jìn)電機(jī)的旋轉(zhuǎn)能精確到1.8°之差,能旋轉(zhuǎn)到特定的角度 正因?yàn)檫@個(gè)特性,用步進(jìn)電機(jī)來(lái)畫(huà)畫(huà)就很準(zhǔn)確,不僅如此,在自動(dòng)化設(shè)備中大部分采用的也是步進(jìn)電機(jī)...

。SIMATIC S7-1200 具有用于進(jìn)行計(jì)算和測(cè)量、閉環(huán)回路控制和運(yùn)動(dòng)控制的集成技術(shù),是一個(gè)功能非常強(qiáng)大的系統(tǒng),可以實(shí)現(xiàn)多種類(lèi)型的自動(dòng)化任務(wù)。...
隨著車(chē)間主任將生產(chǎn)線電控柜內(nèi)總斷路器合閘,“嘭”的一聲炸響,電控柜內(nèi)75kW變頻器居然直接爆炸了,只嚇得車(chē)間主任嗷嗷亂叫,好在斷路器及時(shí)跳閘。...

隨著大數(shù)據(jù)時(shí)代的來(lái)臨,各類(lèi)信息資源的輕易獲取使得深度學(xué)習(xí)的應(yīng)用也越來(lái)越廣泛。特別是在卷積神經(jīng)網(wǎng)絡(luò)中,圖片被深度卷積和池化之后,隱含層能夠表現(xiàn)出比手動(dòng)獲取更加具有泛化性和抽象性的特征,從而在識(shí)別分類(lèi)上取得了很好的效果。...

系統(tǒng)主要有現(xiàn)場(chǎng)控制站(I/O站)、數(shù)據(jù)通訊系統(tǒng)、人機(jī)接口單元(操作員站OPS、工程師站ENS)、機(jī)柜、電源等組成。系統(tǒng)具備開(kāi)放的體系結(jié)構(gòu),可以提供多層開(kāi)放數(shù)據(jù)接口。...
電動(dòng)機(jī)運(yùn)行時(shí),一般允許短時(shí)間過(guò)載(輸出功率超過(guò)額定值稱為過(guò)載)。但是、如果過(guò)載時(shí)間太長(zhǎng),電動(dòng)機(jī)的溫升超過(guò)允許值,就會(huì)造成絕緣老化,縮短使用壽命,嚴(yán)重時(shí)甚至燒毀繞組。...

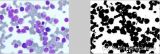
現(xiàn)有的圖像分割方法主要分以下幾類(lèi):基于閾值(threshold)的分割方法、基于區(qū)域的分割方法、基于邊緣的分割方法以及基于特定理論的分割方法等。...
小黃人智能門(mén)機(jī)控制器實(shí)現(xiàn)轎頂檢修和門(mén)控一體化的深度融合,針對(duì)異常門(mén)機(jī)狀態(tài)提供預(yù)維保提醒,降低門(mén)系統(tǒng)50%故障率;遠(yuǎn)程指導(dǎo)檢測(cè)維修,定位故障快狠準(zhǔn)。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1




