完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
聯軸器連接螺栓的周向間距不良,對稱性被破壞;聯軸器加長節偏心,將會產生偏心力;聯軸器錐面度超差;聯軸器靜平衡或動平衡不好; 彈性銷和聯軸器的配合過緊,使彈性柱銷失去彈性調節功能造成聯軸器不能很好地對中。...
要實現PLC的遠程控制和程序上下載,其實市場上早就有成熟完備的解決方案,僅需要根據自己需求選擇工業網關去打造合適的工業物聯網系統,就能輕松實現PLC遠程調試或程序更新。...
無功功率不但增加線損和設備的發熱,更主要的是因為功率因數的降低導致電網有功功率的降低。可知,當功率因數越大,有功功率越大。...
一大堆梯形圖看著真是眼花繚亂,不用擔心我們一段一段分析分析這個機械手是如何工作的! 其實這個圖沒有那么多的并行分支,所以轉移起來邏輯非常簡單!...

可以使用以下數據類型:BOOL,BYTE,CHAR,WCHAR,WORD,LWORD,DWORD,INT,UINT,USINT,SINT,LINT,ULINT,DINT,UDINT,REAL,LREAL。在類型為 ARRAY 或 STRUCT 的數據結構中也可使用這些數據類型。...

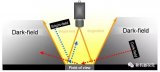
透射電鏡圖像分為試樣的顯微像和衍射花樣,這兩種像分別為不同電子成像,前者是透射電子成像,后者為散射電子成像。...
PLC、HMI/SCADA和歷史數據庫通常與IT基礎設施分開。伴隨著OT設備的改進,以及相關網絡和通信協議技術的發展,數據收集變得更簡單,在某種程度上,OT設備甚至可以更直接地與IT系統交互。...

先,我們來談談控制方式。控制方式即速度控制、轉距控制、PID控制或其他方式。采取控制方式后,一般要根據控制精度進行靜態或動態辨識。...

運動控制其實是基于電動機的,這里的電動機指的是伺服電機;如果一套單機設備上只用了一臺伺服電機,這種情況下是更注重于對電機的一個控制,如位置、速度、轉矩的控制;這個例子,是想單臺電機控制只是運動控制的一個環節。...

新能源電動車的“三電”技術,相信很多朋友都能說出“電池、電機、電控”,不僅僅是消費者把“電池”排在第一位,廠家在宣傳時也經常把“電池技術”拿來展示,那為什么消費者和廠家,最先提及的都是電池技術,而不是電機技術呢?咱們從兩個方面來解釋這個問題。...


通過模擬量輸出控制運動對象動作,要先確定運動對象的信號類型和量程等參數。信號類型常見的有電流4~20mA和電壓0~5V/10V等;量程是設備自身的參量,比如氣缸控制閥流量開度為0~100%,K型熱電偶測溫范圍0~1300℃等。...
在主回路中可使用電容板、橋臂、LC電路以及其他電路結構相互配合任意搭配出所需要的電路結構。可采集輸入輸出電壓以及環路電流,送入CBox快速原型控制器中處理,并配合相關的控制算法控制產生功率管驅動脈沖以及其他的控制電平,實現完整的系統控制。...

如果在 GRAPH 接口中將變量“Conveyor_Start_Conveyor” 的信號狀態設置為“1”,則在此函數中滿足必須激活兩個輸出參數“Forward”或“Backward”中一個的條件。...

編碼器測量直線位移的方式 (1)編碼器裝在絲杠末端 通過測量滾珠絲杠的角位移q,間接獲得工作臺的直線位移x,構成位置半閉環伺服系統。 (2)絲杠螺距 設:螺距t=4mm,絲杠在4s時間里轉動了10圈,求:絲杠的平均轉速n(r/min)及螺母移動了多少毫米?螺母移動的平均速度v又為多少?...

根據工人的描述,我們初步判斷是那臺機的接觸器粘連了。然而,當我們找到那臺機的接觸器時,發現它并沒有吸合。我們打開了總急停開關,單獨啟動和停止那臺機器,看起來一切正常,但是停機時間卻比正常情況下要長一些。...

數字圖像,又稱為數碼圖像或數位圖像,是二維圖像用有限數字數值像素的表示。數字圖像是由模擬圖像數字化得到的、以像素為基本元素的、可以用數字計算機或數字電路存儲和處理的圖像。...

步進系統=步進驅動器+步進電機。步進電機由步進驅動器來驅動,相當于驅動電源,且它受外部的脈沖信號和方向信號控制(這里舉例是西門子PLC輸出脈沖),進而控制步進電機的旋轉角度和速度。...

具體的說,就是讓機器去識別攝像機拍攝的圖片或視頻中的物體,檢測出物體所在的位置,并對目標物體進行跟蹤,從而理解并描述出圖片或視頻里的場景和故事,以此來模擬人腦視覺系統。因此,計算機視覺也通常被叫做機器視覺,其目的是建立能夠從圖像或者視頻中“感知”信息的人工系統。...

傳統電機的電刷向轉子繞組傳輸功率,當通電時,轉入固定磁場。靜止的刷子與旋轉轉子上的旋轉金厘觸點之間的摩察會號致磨損。另外,由于電刷與金屬接觸不良和電列放電,可能會損失電力。...
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




